Method for collaboratively searching for multi-dynamic target in unknown sea area by unmanned aerial vehicle group based on enhanced learning
A technology of reinforcement learning and dynamic target, which is applied in the field of collaborative search of multi-dynamic targets by drone groups in unknown sea areas, which can solve problems such as limited and unsatisfactory multi-target search, reduce the scale of search decision-making problems, and improve search efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
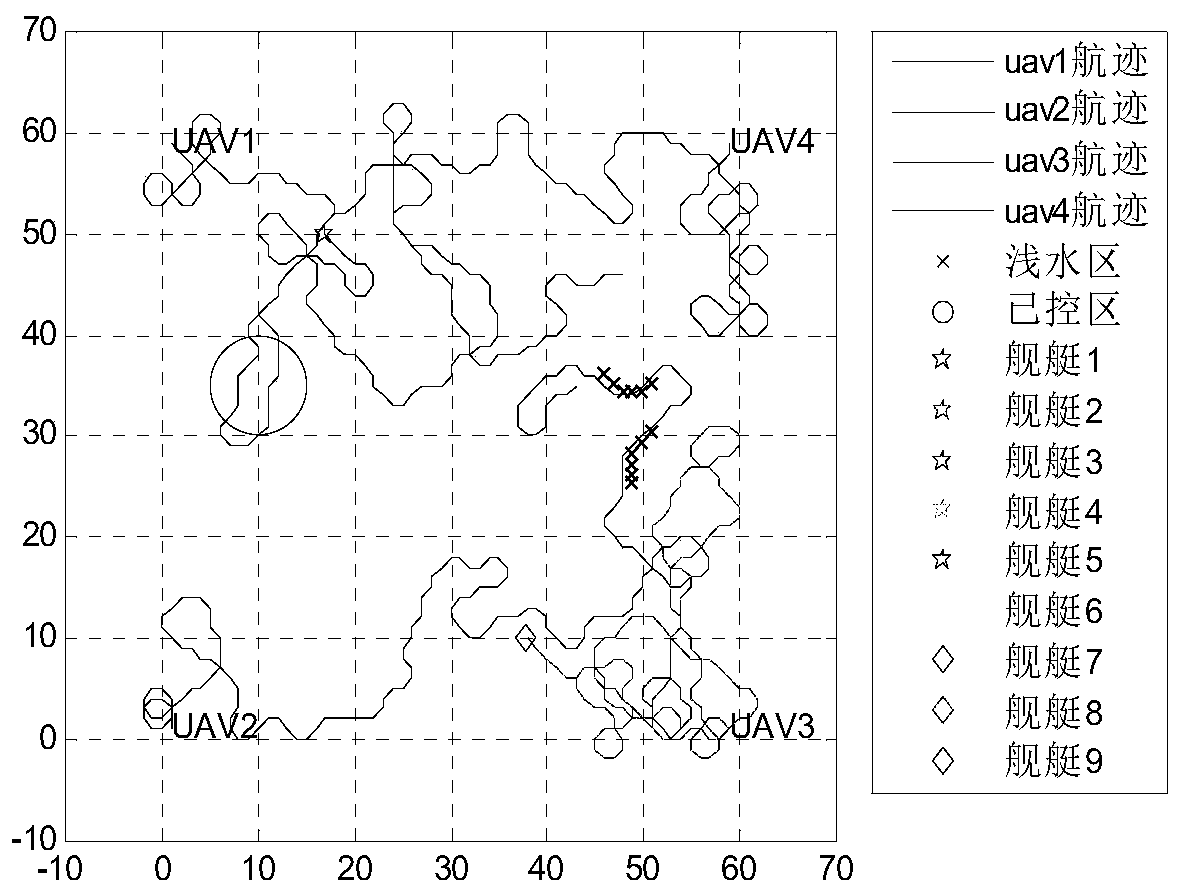
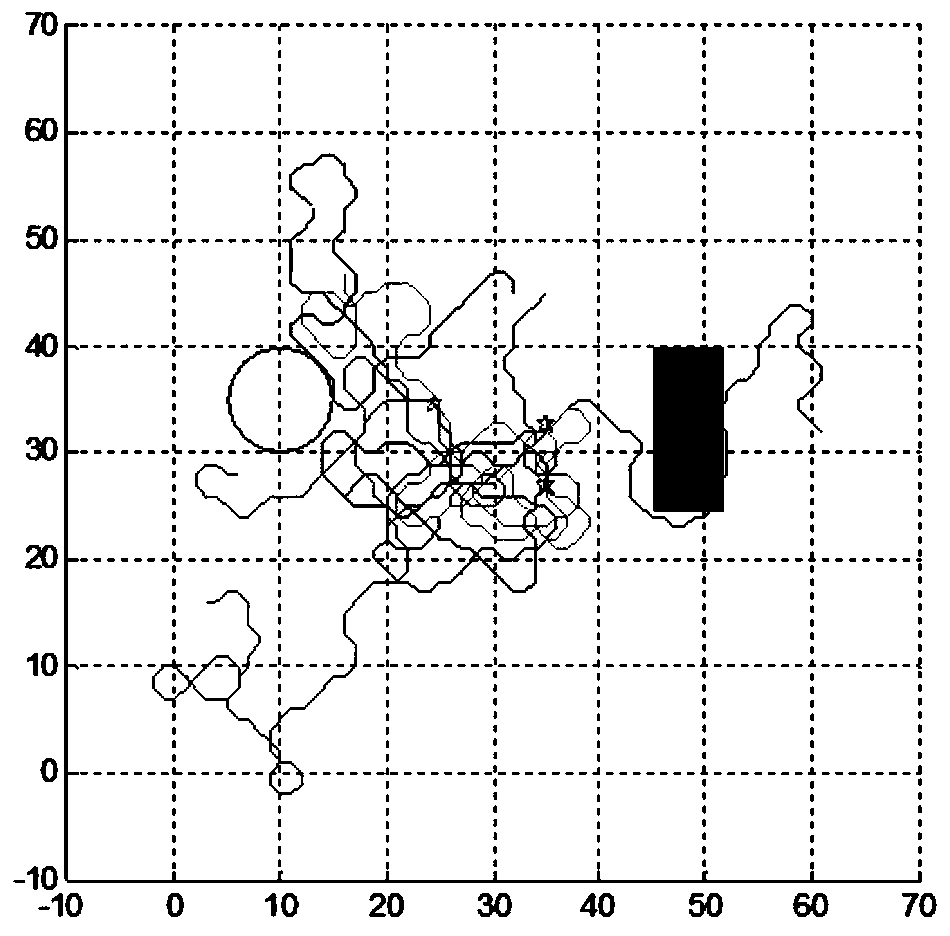
[0054] Such as figure 1 Figure 7 A reinforcement learning UAV swarm collaborative search method for multiple dynamic targets in unknown seas is shown, which specifically includes the following steps:
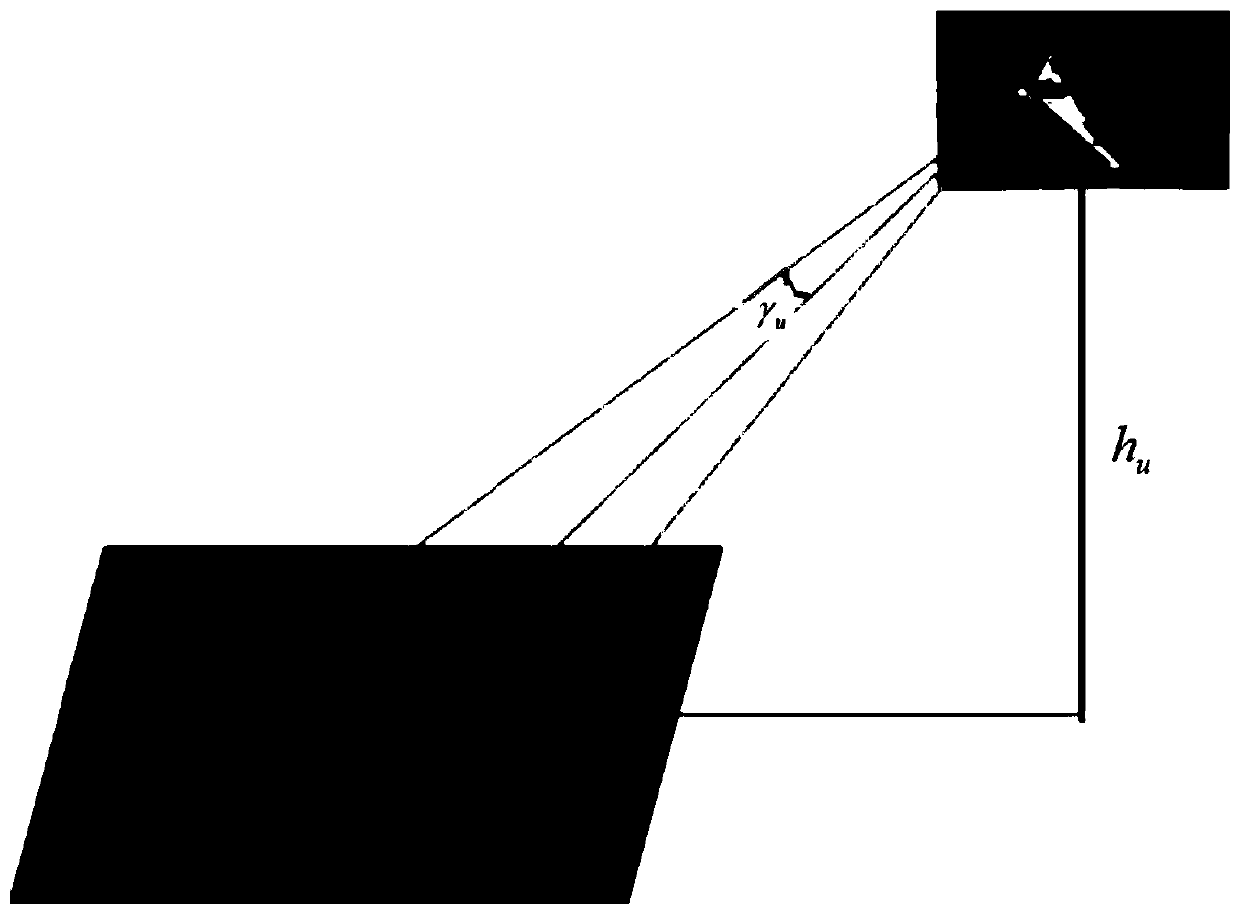
[0055] S1: Use the grid method to divide the search sea area into Lx × L y raster. Establish a multi-UAV sea area search map based on the sea surface environment, UAV dynamics, sea surface movement ship dynamics and sensor detection model information, and establish a search map Where (m, n) is the grid coordinate, k is the time, and the specific numerical calculation process is as follows:
[0056] S11: Establishing Territorial Awareness Infographic: When Drone V i Generate pheromone H ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com