A time-optimal trajectory planning method for robot path tracking
A trajectory planning and time-optimized technology, applied to instruments, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve difficult integration, inaccurate dynamic models, and increase trajectory planning calculations Time and other issues, to achieve the effect of reducing the number of planning points and reducing planning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0100] By the following specific examples for the purposes of the present invention are described in further detail, examples not attempting to repeat, but the embodiment of the present invention is therefore not limited to the following examples.
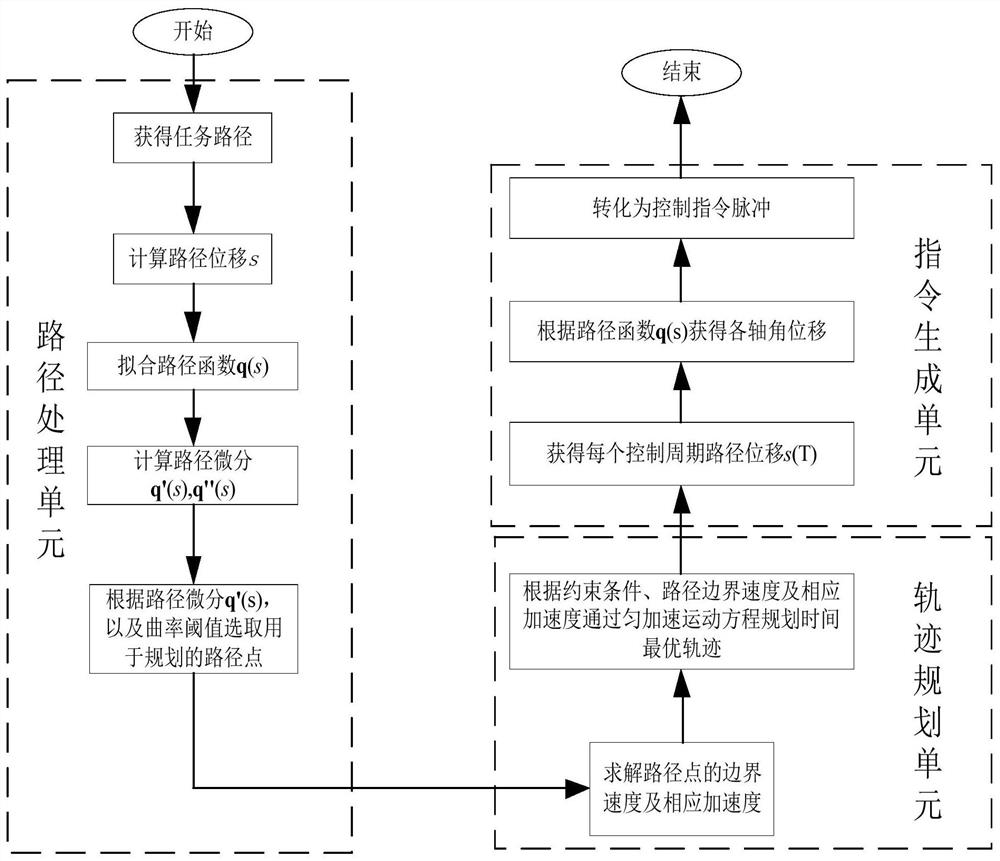
[0101] like figure 1 A method for time tracking robot path planning system illustrated optimal trajectory, the system comprising a processing unit path, trajectory planning unit and instruction generating unit;
[0102] Wherein the path calculation processing unit executes displacement processing path, the path function fitting process, the differential coefficient calculation processing path planning and path point extraction processing;
[0103] Trajectory planning means for optimal trajectory path between the displacement speed of the floor plan of the robot, planning point of assuming constant acceleration, constant acceleration by equation planning;
[0104] The instruction generating unit for obtaining the optimal trajectory, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com