Collision avoidance decision-making method based on water surface unmanned ship
A decision-making method and the technology of unmanned boats, applied in the field of navigation and navigation, can solve problems such as confusion and ambiguity, and achieve the effect of easy implementation, guarantee of navigation safety, accurate and reliable autonomous collision avoidance decision-making function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
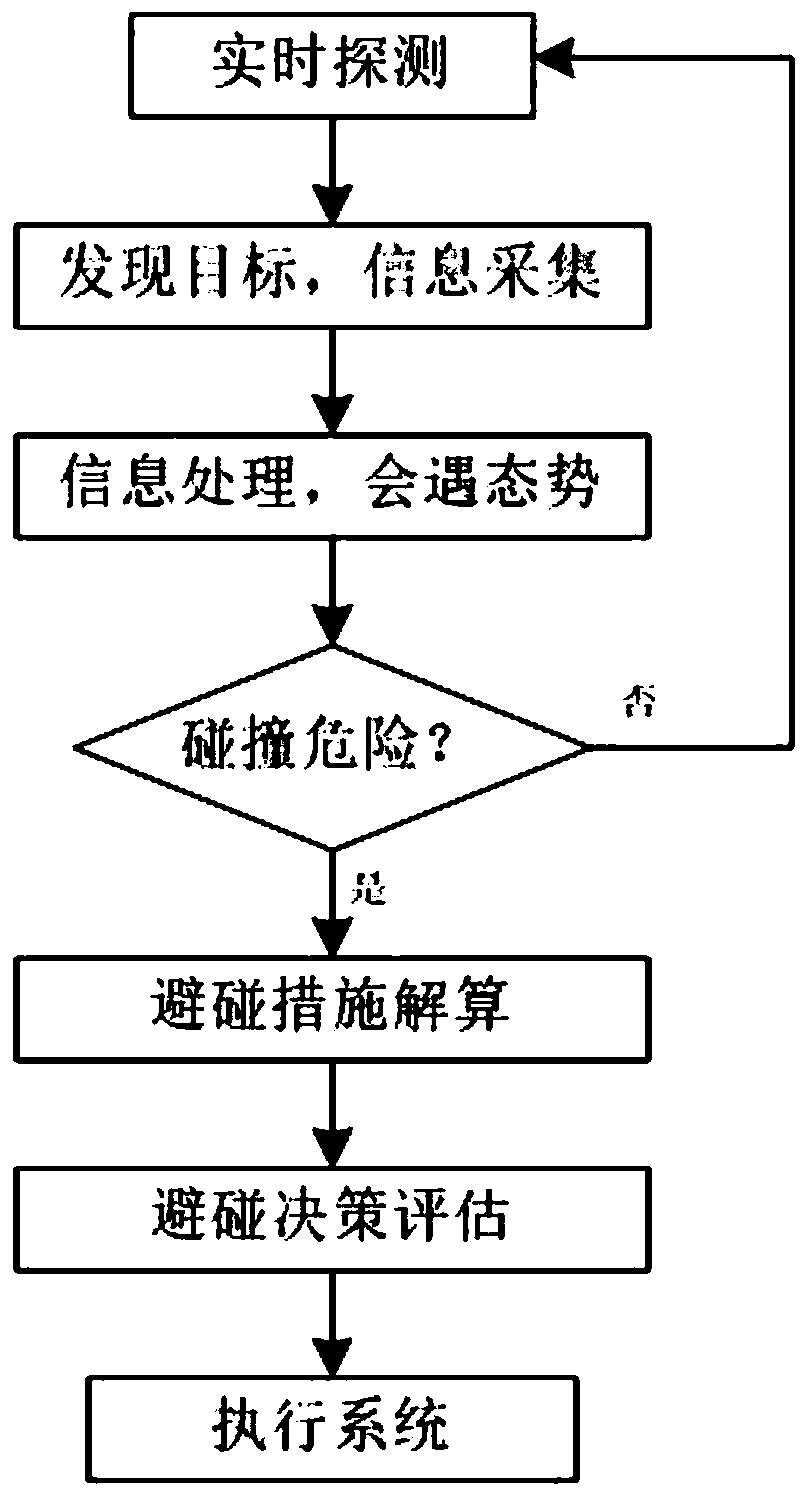
[0036] A collision avoidance decision-making method based on surface unmanned vehicles, such as figure 1 shown, including the following steps:
[0037] Step 1: Use the UAV perception system to detect and collect information about obstacles or encounter ships in real time.
[0038] The unmanned vehicle perception system includes navigation radar, laser radar, photoelectric system, and video system. Distance, speed, heading and other information.
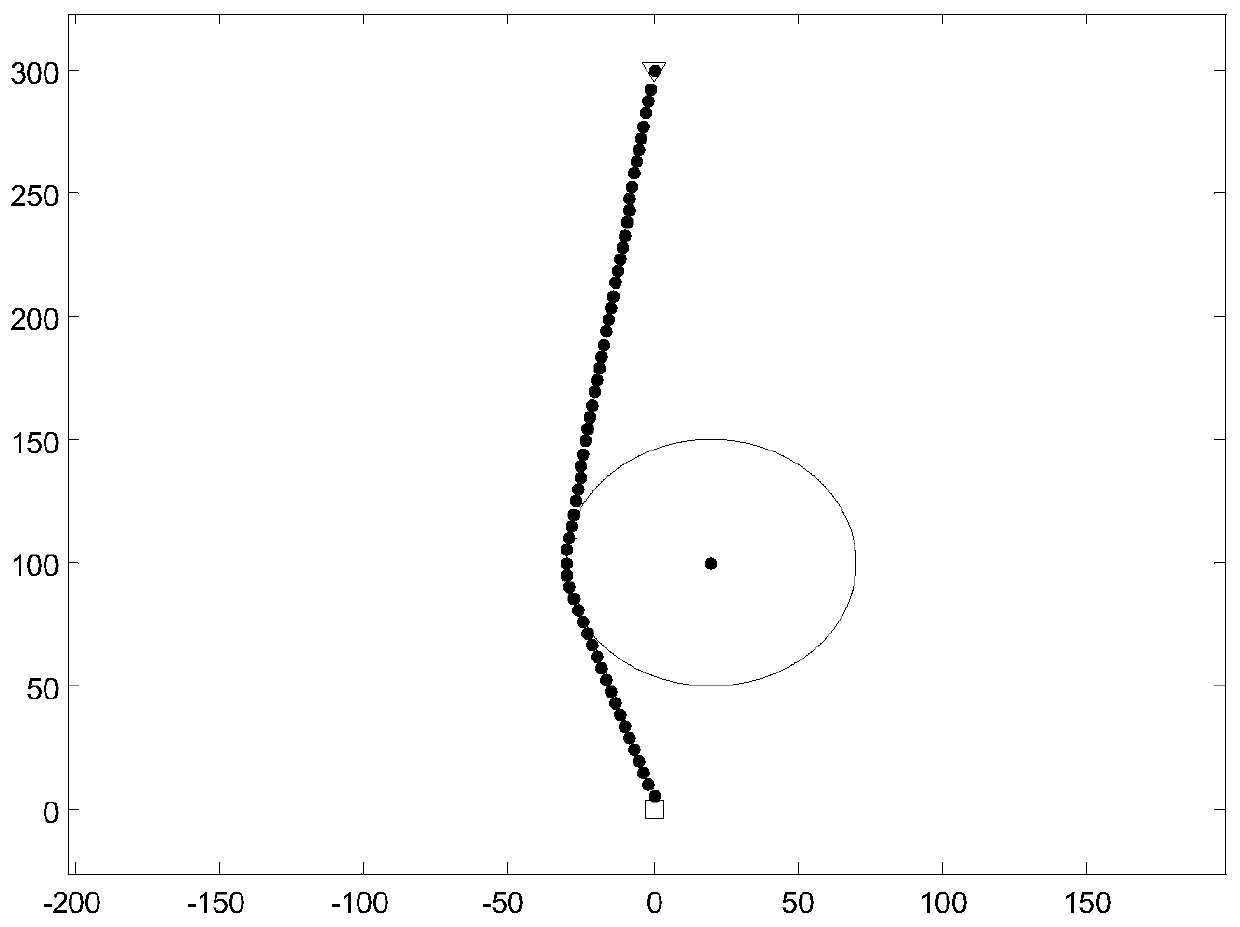
[0039] in such as image 3 In the shown embodiment 1, the static target is 102m away from the ship, and the azimuth is 11.3°; Figure 4 In the shown embodiment 2, the dynamic target is 201m away from the ship, the azimuth is 5.7°, the speed is 6kn, and the heading is 190°. The boat initially sails at 10kn towards 0°; the target waypoint is 300m ahead.
[0040] Step 2: Analyze the encounter situat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com