Subway station door fault detection method and system based on digital twin robot
A technology for fault detection and subway stations, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the complex structure of subway platform doors, the inability to accurately judge the working parameters and faults of subway platform doors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Various exemplary embodiments of the present invention will now be described in detail with reference to the accompanying drawings. It should be noted that the relative arrangements of components and steps, numerical expressions and numerical values set forth in these embodiments do not limit the scope of the present invention unless specifically stated otherwise.
[0054] Techniques, methods and devices known to those of ordinary skill in the relevant art may not be discussed in detail, but where appropriate, such techniques, methods and devices should be considered part of the description.
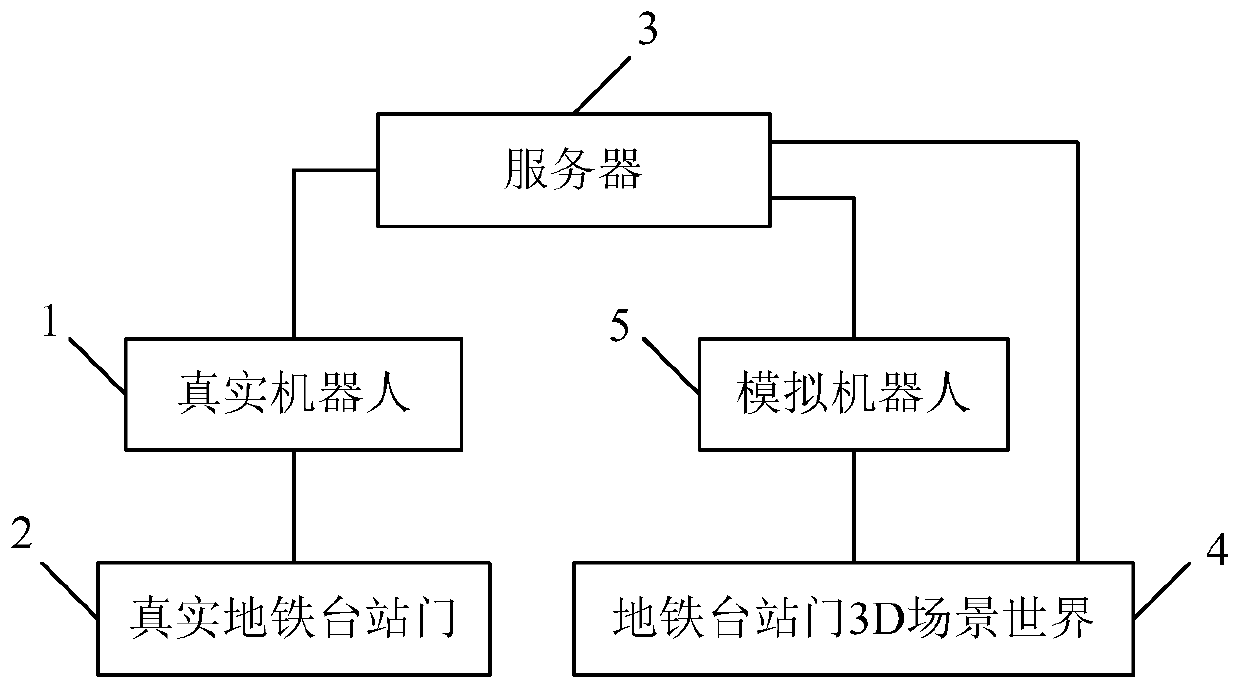
[0055] figure 1 It is a structural schematic diagram of an embodiment of the subway platform door fault detection system based on the digital twin robot of the present invention, as figure 1 As shown, the subway platform door fault detection system based on the digital twin robot includes:
[0056] Real robot 1, real subway station door 2, server 3, subway station door 3D scene ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com