Immersed invariant flow adaptive quadrotor control method based on integral sliding mode
A technology of integral sliding mode and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as difficult observation, influence of UAV control effect, and inability to track trajectory.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
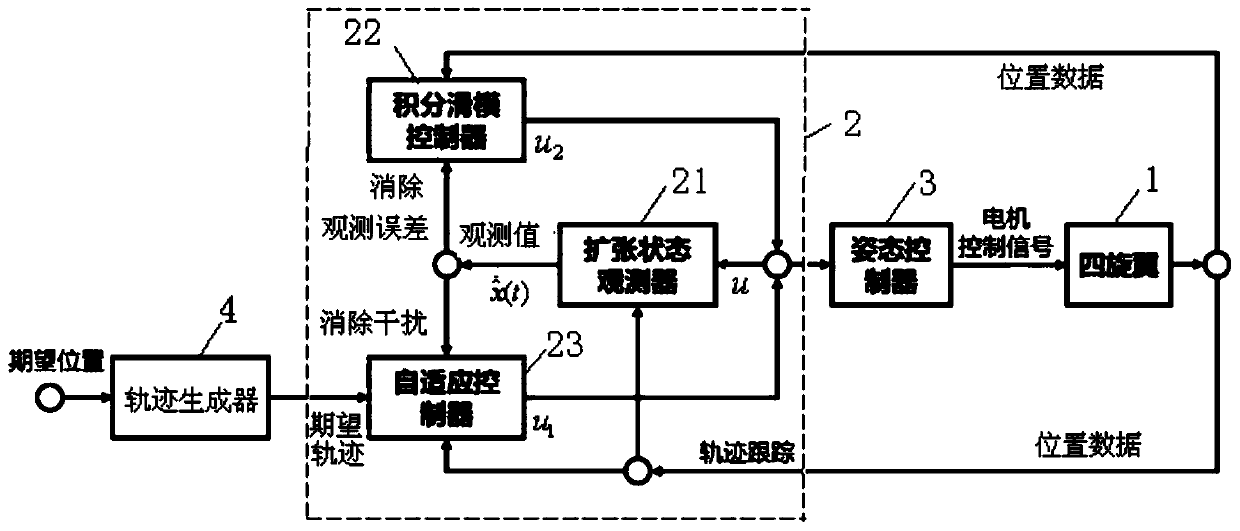
[0051] Such as figure 1 Shown is an adaptive quadrotor control method based on an integral sliding mode based on an integral sliding mode, which is used to solve the problem of ignoring the response time of the attitude controller in the general model, which includes:
[0052] Step S1: Provide a quadrotor UAV 1, measure its position data, construct an expanded state observer 21 to estimate the total interference of the quadrotor UAV 1, and obtain the observed value of the expanded state observer 21
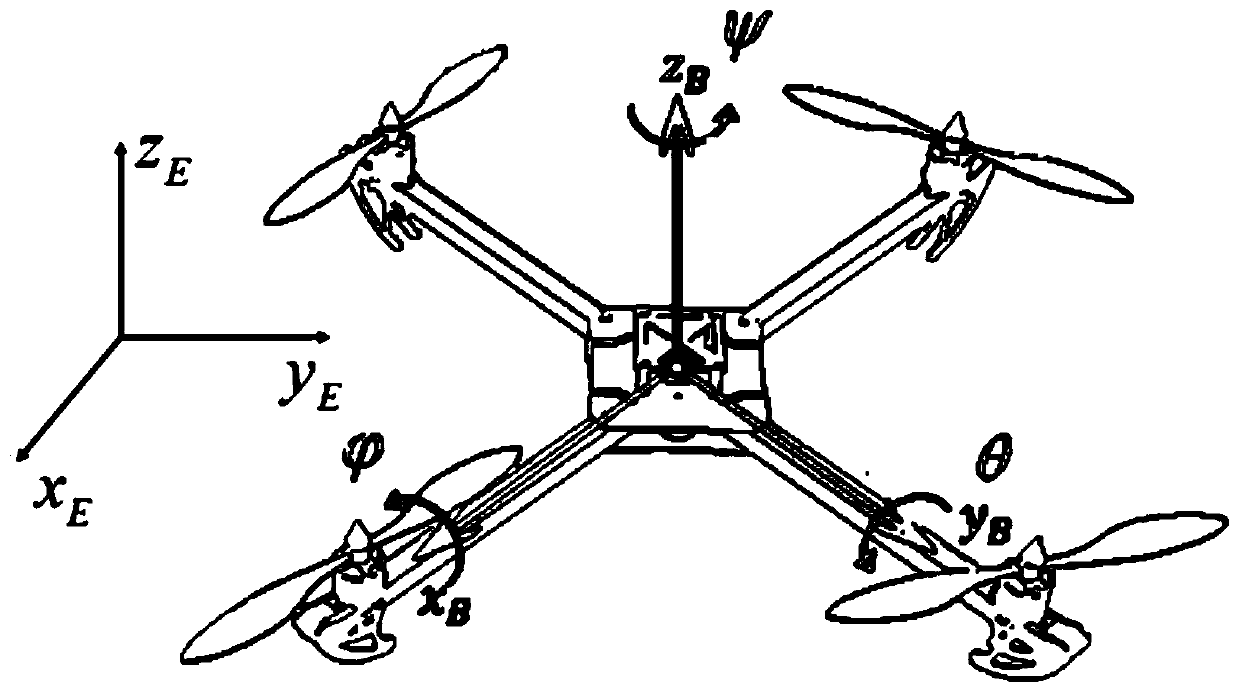
[0053] Such as figure 2 As shown, in step S1, the position data of the quadrotor UAV 1 includes the x of the quadrotor UAV 1 E axis direction and y E axis, and the pitch angle θ and roll angle of the quadrotor UAV 1 Among them, the x of quadrotor UAV 1 E axis direction and y E The positions in the axial direction are all measured by IMU or GPS, and the pitch angle θ and roll angle of the quadrotor UAV 1 are Measured with a gyroscope.
[0054] In step S1, the extended s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com