Triphibious robot
A robot and ontology technology, applied in the field of intelligent robots, can solve the problems of high cost, large size and complex structure, and achieve the effect of low cost, high speed and wide application occasions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
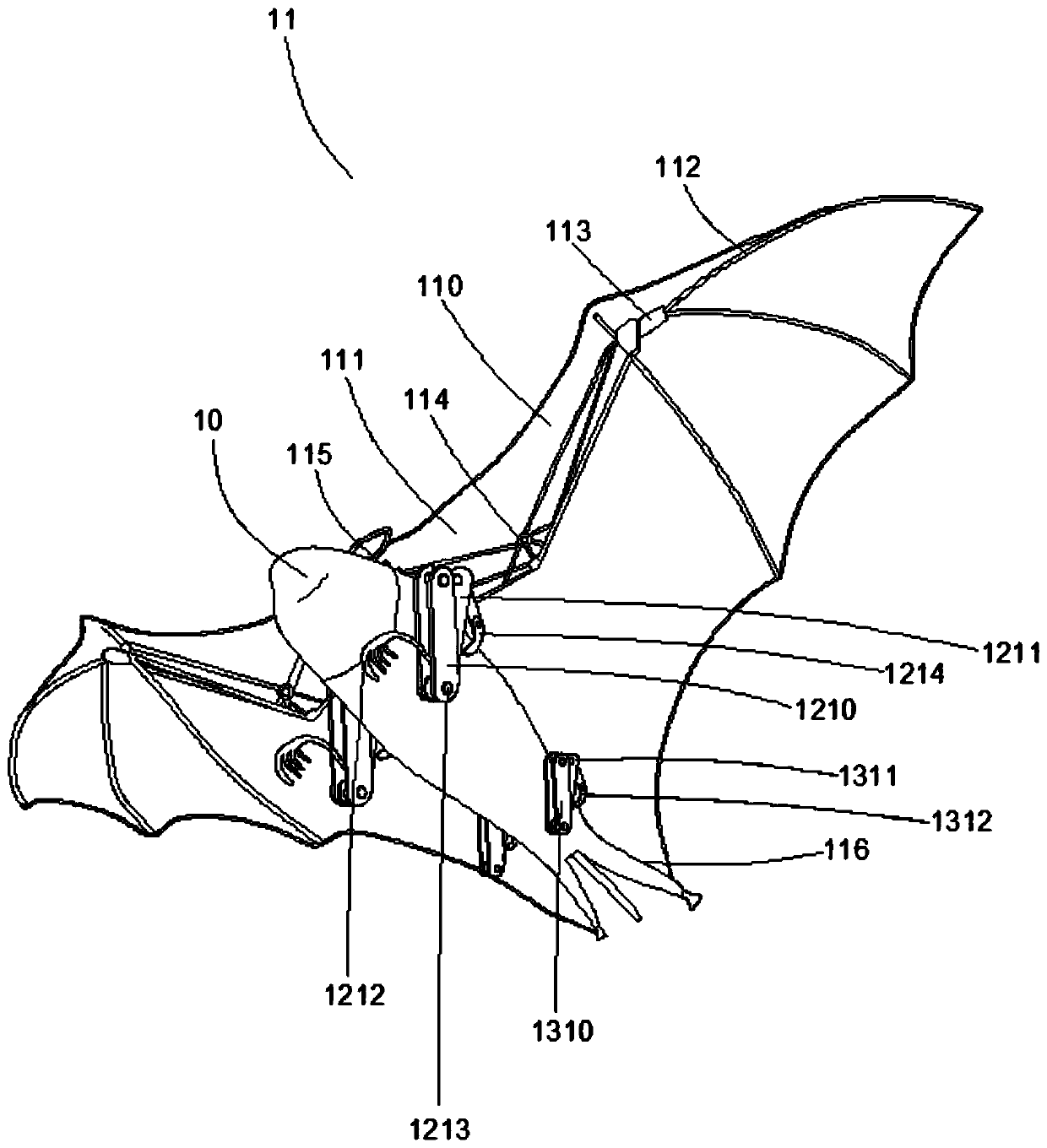
[0033] Such as figure 1 As shown, a amphibious robot includes a main body 10, a signal receiving unit, a flying unit 11, a first moving unit 12, and a second moving unit 13. The signal receiving unit, the flying unit 11, the first moving unit 12, and the second moving unit The moving units 13 are all arranged on the body 10;
[0034] The signal receiving unit is used to receive a control signal from a terminal and transmit the control signal to the flight unit 11, the first mobile unit 12, and the second mobile unit 13; the terminal in this embodiment may be a mobile phone Or computers and other equipment, but not limited to this, and will not be detailed here;
[0035] The flight unit 11 drives the main body 10 to perform flight actions according to the control signal;
[0036] The first moving unit 12 is arranged at the front end of the main body 10 and includes two identical first moving parts 121 arranged symmetrically with respect to the central axis of the main body 10. The fi...
Embodiment 2
[0049] Such as figure 2 As shown, the difference between this embodiment and Embodiment 1 is that the two claw feet 1212 are retracted according to the control signal, and the two front lower legs 1211 and the two rear lower legs 1311 are When the control signal is extended, the two front lower legs 1211 and the two rear lower legs 1311 form a quadruped walking structure, and the main body 10 moves following when the quadruped walking structure performs a walking action.
[0050] Preferably, when the main body 10 performs a walking action under the quadruped walking structure, the flying unit 11 is folded and contracted according to the control signal. When the main body 10 performs a walking action under the four-legged walking structure, the folding and shrinking of the flying unit 11 can make it smaller, so that it can enter a smaller space to perform detection tasks, and the resistance encountered when moving forward will also be Become smaller. Of course, the main body 10...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com