


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Driving rear-mounted lower extremity exoskeleton robot
A rear-mounted, exoskeleton technology, applied in the field of robotics, can solve the problems of excessive lower limb exoskeleton size, excessive power source equipment, and huge demand scale, achieving the effects of light weight, good energy saving effect and high transmission efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings.
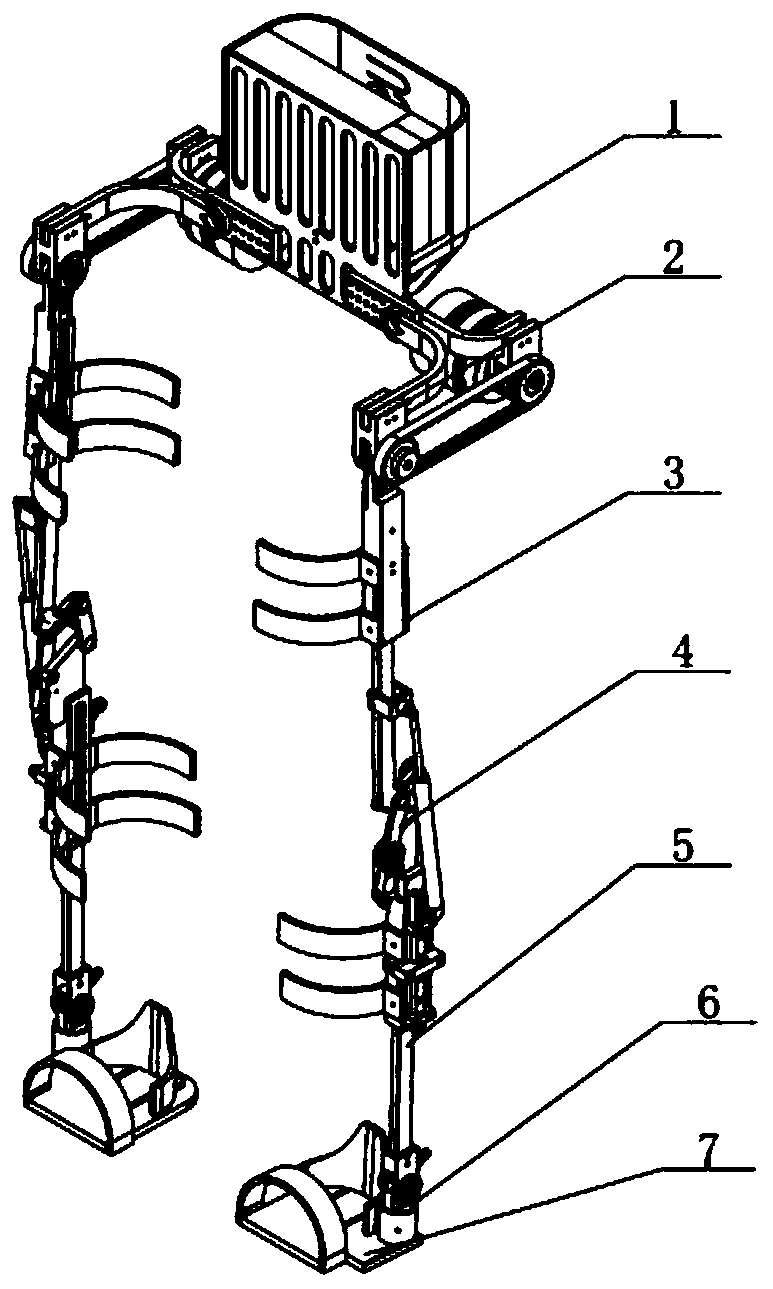
[0027] like Figure 1 to Figure 7 As shown, the driving rear-mounted lower limb exoskeleton robot of the present invention includes a back assembly 1, and two hip joint assemblies 2, two thigh rods 3, Two knee assemblies 4 , two calf bars 5 , two ankle assemblies 6 and two foot assemblies 7 .
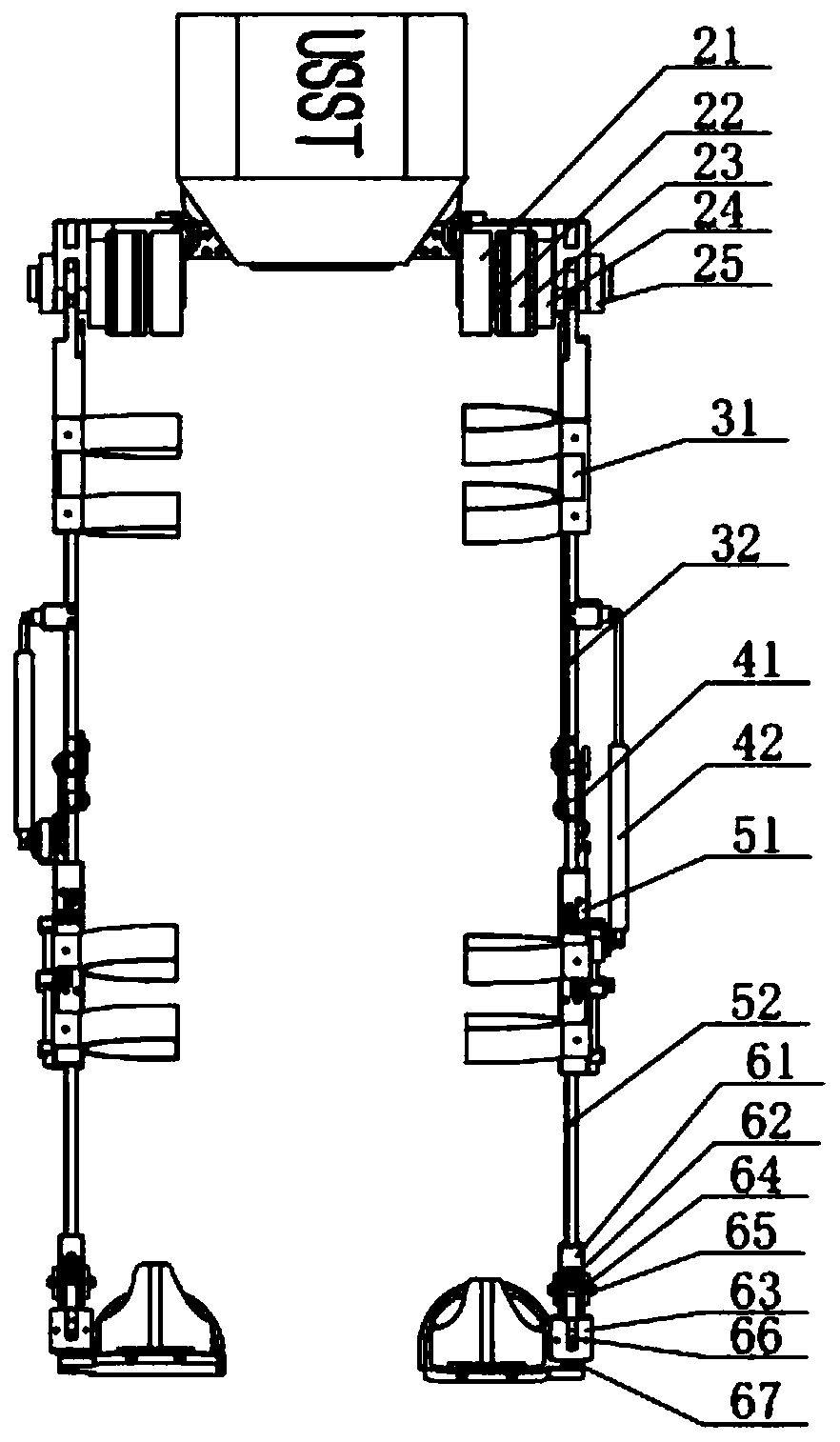
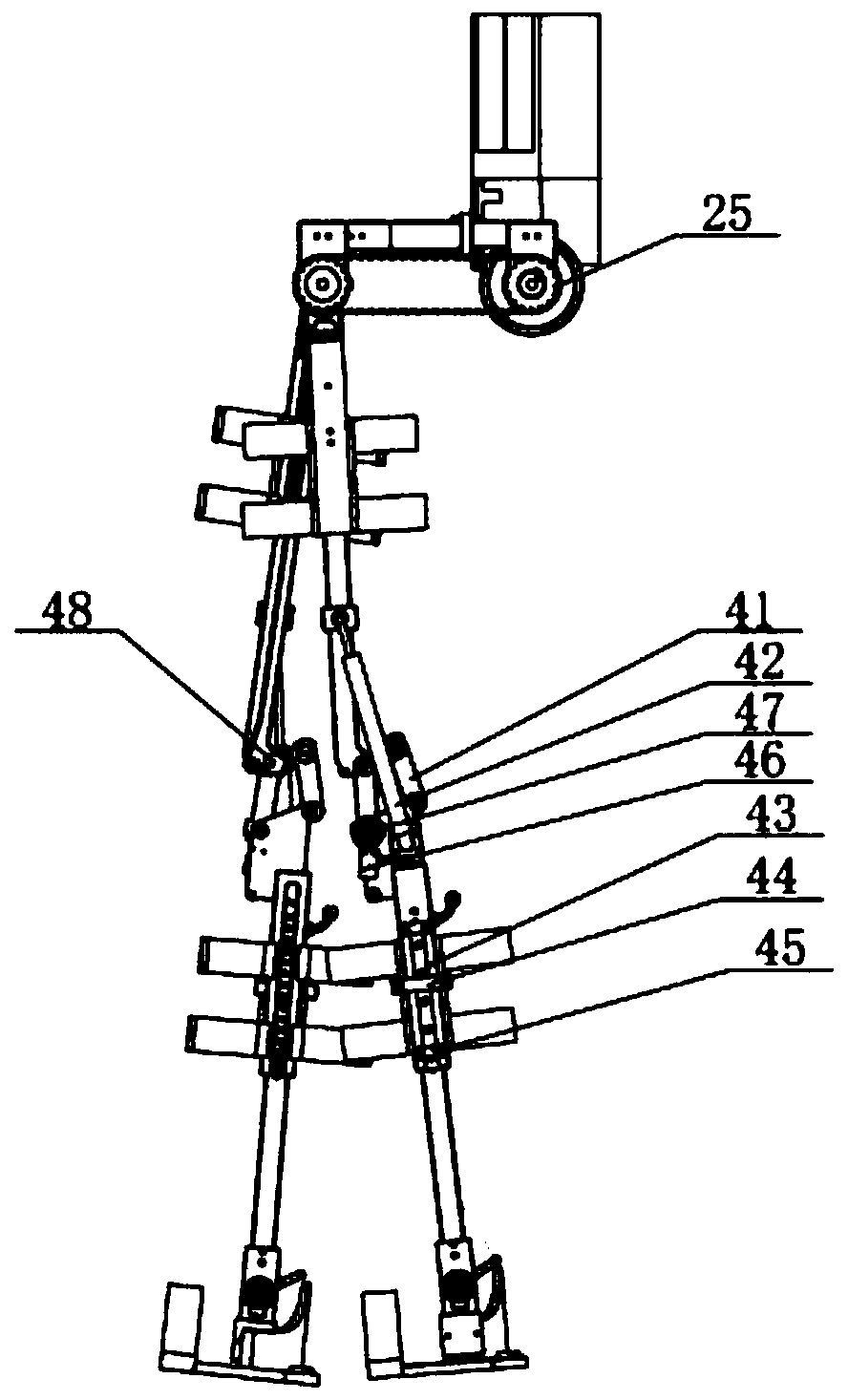
[0028] The hip joint assembly 2 includes a driving motor 21, a flange 22, a harmonic reducer 23, a torque sensor 24, a synchronous belt mechanism 25 and an output shaft 26; the motor 21 is connected to the harmonic through the flange 22. wave reducer 23; the output shaft 26 of the drive motor 21 is connected to one side of the back support plate 1 through a key; the torque sensor 24 is fixedly connected to the harmonic reducer 23, and the torque sensor 24 is used to transmit torque and place it completely on the back; the synchronous belt mechanism 25 is composed of a synchr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com