Multiple-unmanned-aerial-vehicle multiple-ant-colony collaborative target searching method
A multi-UAV and search target technology, applied in the field of multi-UAV and multi-ant colony collaborative search targets, can solve the problems of long search time, low search efficiency, and overlapping and overlapping UAVs, so as to improve efficiency and search Efficiency, the effect of avoiding repeated searches
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
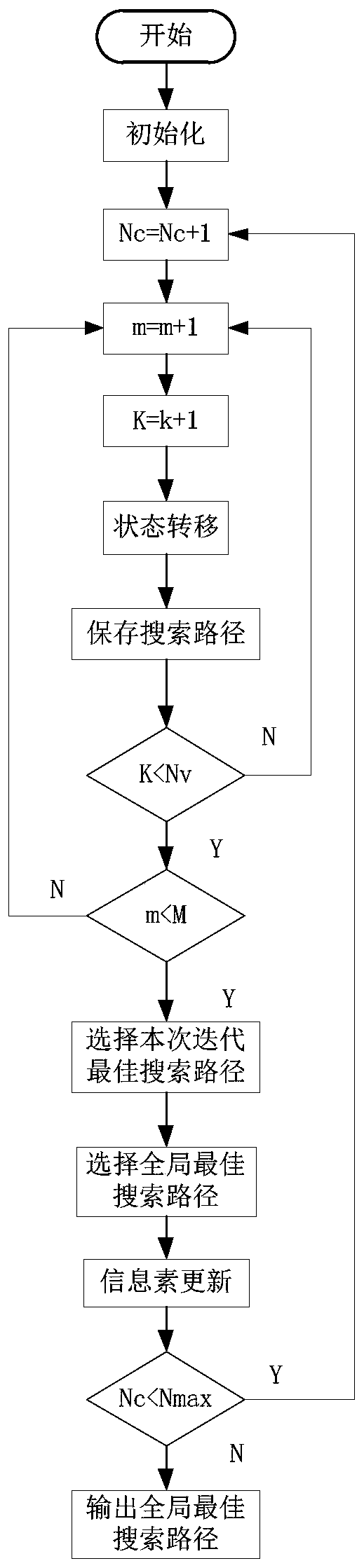
[0047] Such as figure 1 A multi-UAV multi-ant colony collaborative search target method shown: specifically includes the following steps:
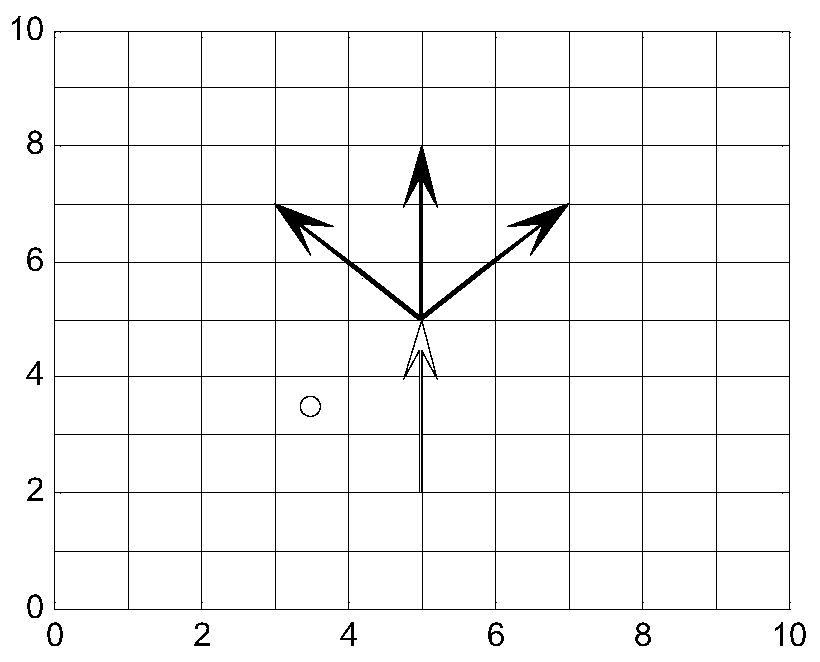
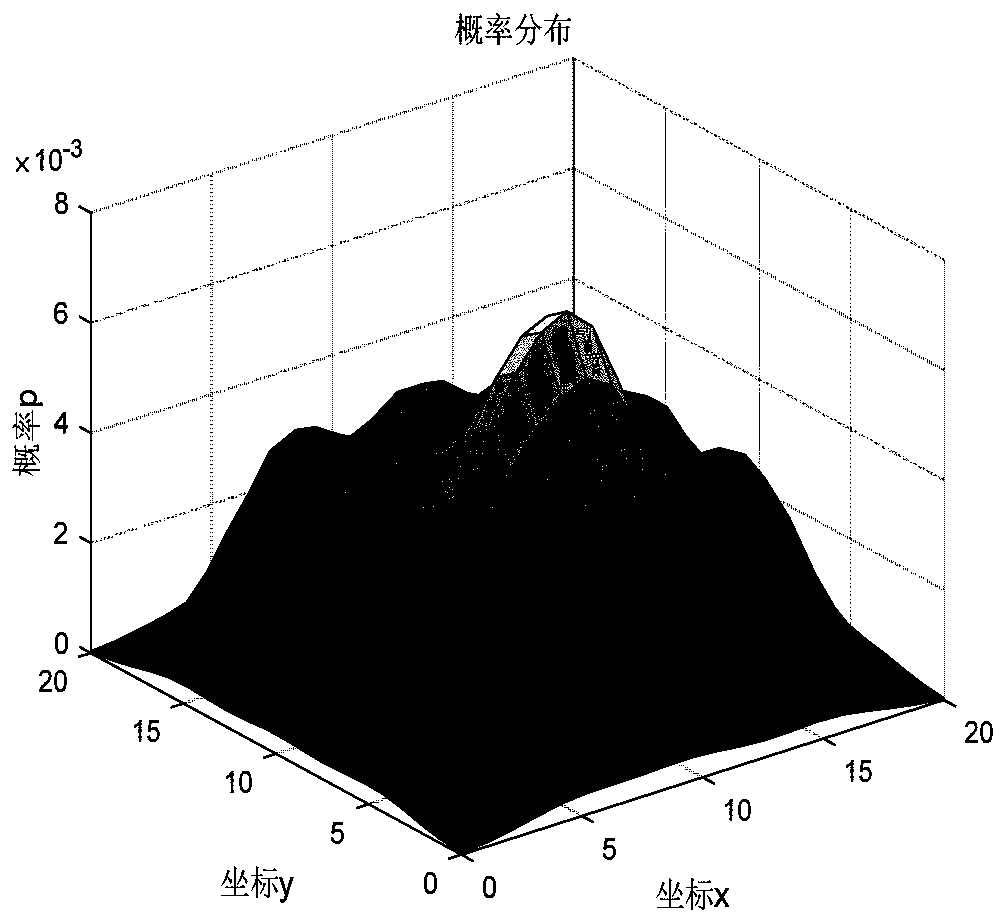
[0048] S1: Model the search environment in the unknown sea area, use the grid method to divide the search area and number the grid, and establish the target probability map model based on the feasible flight direction of the current position of the UAV.
[0049] S2: Establish an objective function, and perform a weighted summation of the UAV steering cost, UAV collision threat cost, and search probability. In the multi-UAV cooperative target search problem, the optimized search path should be as low as possible at the minimum cost. The highest probabili...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com