


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Photoreceptor, flight time measurement device, and optical radar
A light-receiving element and time-of-flight technology, which is used in measurement devices, distance measurement, line-of-sight measurement, etc., can solve the problems of weak signal strength, reduced distance measurement accuracy, and insufficient measurement distance, and achieves increased measurement distance, reduced costs, and reduced The effect of the maximum measurement distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach 〕
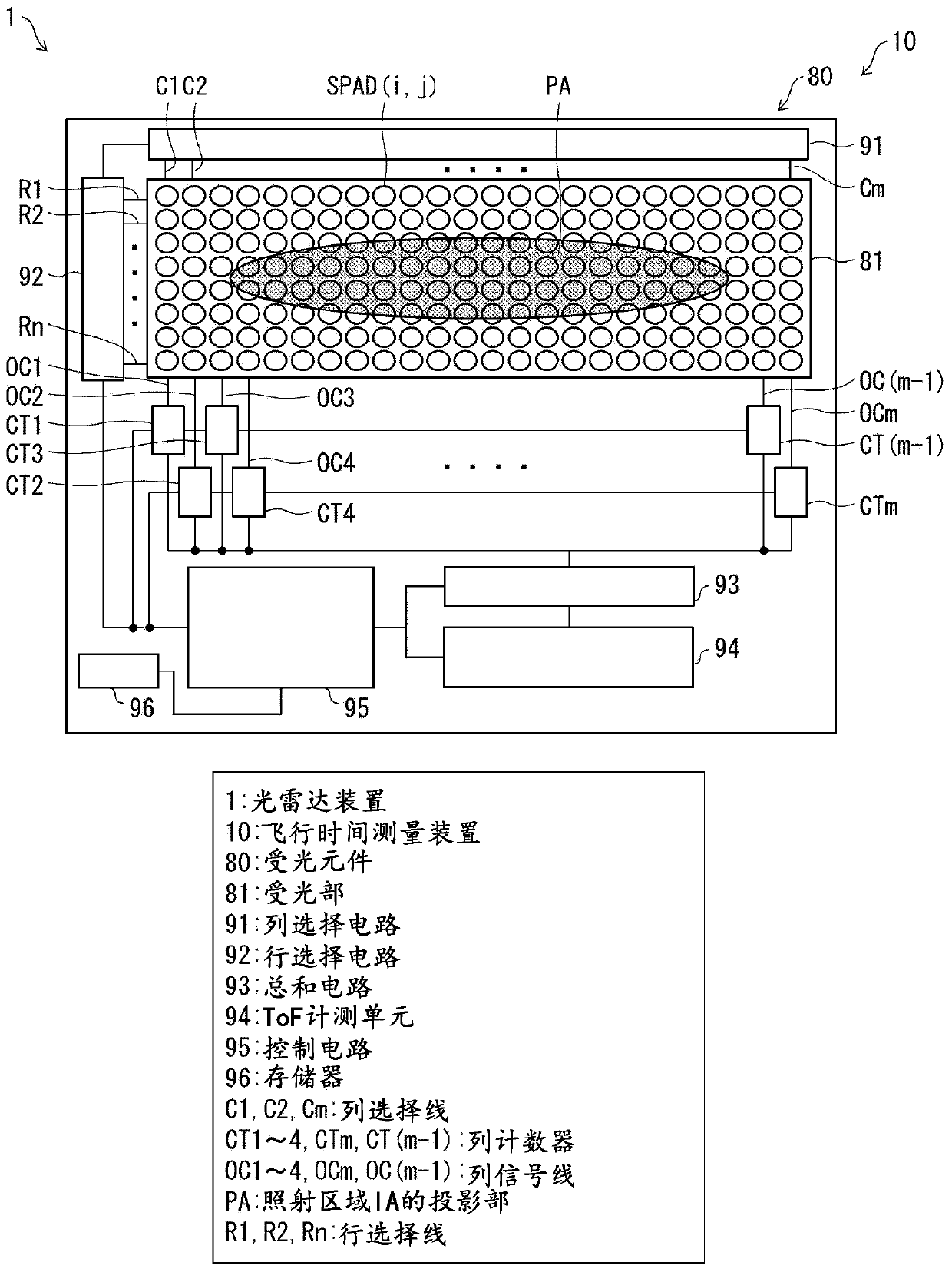
[0059] based on Figure 1 to Figure 13 One embodiment of the present invention will be described as follows.
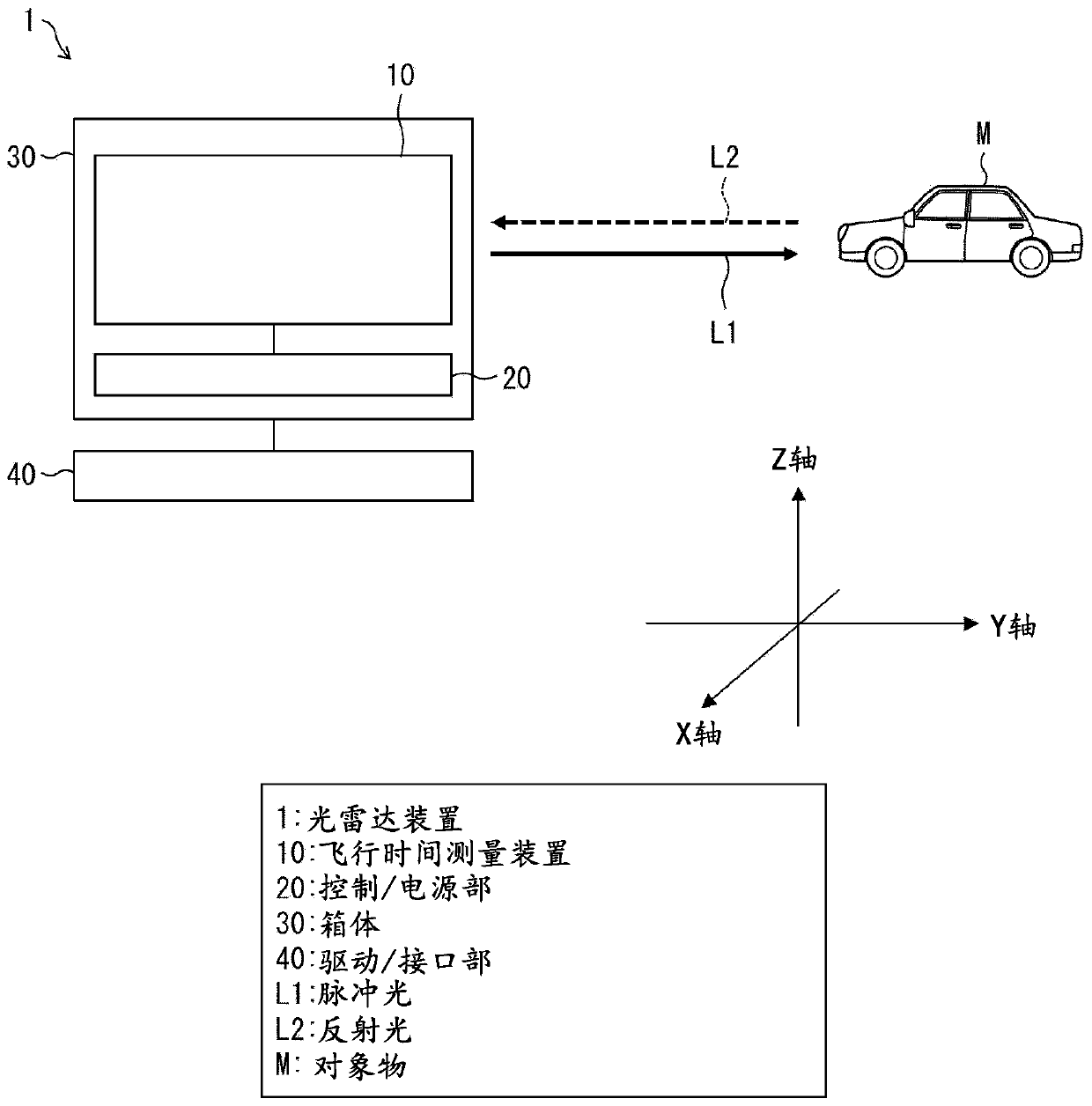
[0060] based on figure 2 The configuration of the lidar device 1 including the time-of-flight measuring device 10 according to the first embodiment of the present invention will be described. figure 2 It is a schematic diagram showing the configuration of the lidar device 1 of the present embodiment.
[0061] LiDAR device 1 such as figure 2 Shown is: a time-of-flight measuring device 10 that irradiates an object M with pulsed light L1 and receives reflected light L2 from the object M; a control / power supply unit 20 that supplies power to the time-of-flight measuring device 10 and controls the pulsed light and the case 30 that holds the time-of-flight measuring device 10 and the control / power supply unit 20 .
[0062] In addition, the lidar device 1 rotates the housing 30 and includes a drive / interface section 40 that includes an interface that supplies power to...
Deformed example 1
[0165] based on Figure 12 The configuration of a laser radar device 1 a as Modification 1 among the laser radar device 1 of the first embodiment will be described. Figure 12 It is a schematic diagram showing the configuration of a lidar device 1 a according to Modification 1 of the first embodiment.
[0166] like Figure 12 As shown, the LiDAR device 1a is different from the LiDAR device 1 in that it is not a rotating mechanism and scans the measurement area using a mirror. However, the time-of-flight measurement device 10 a has the same function as the time-of-flight measurement device 10 . Since there is no need to rotate the housing 30a, it is easy to achieve reduction in size, weight, and power consumption. In addition, the reflective mirror surface is advantageous in that two-dimensional scanning is possible.
[0167] Specifically, the lidar device 1a of Modification 1 includes: a time-of-flight measuring device 10a that irradiates an object M with pulsed light L1 and...
Deformed example 2
[0173] based on Figure 13 A configuration of a laser radar device 1 b as a second modification of the laser radar device 1 according to the first embodiment will be described. Figure 13 It is a schematic diagram showing the configuration of a lidar device 1 b according to Modification 2 of the first embodiment.
[0174] like Figure 13 As shown, the LiDAR device 1 b is different from the LiDAR device 1 in that it is not a rotating mechanism and scans the measurement area using a polygonal mirror. However, the time-of-flight measurement device 10 b has the same function as the time-of-flight measurement device 10 . Since there is no need to rotate the housing 30b, size, weight, and power consumption can be easily achieved. In addition, polygonal mirrors are advantageous in that they can be scanned in two dimensions.
[0175] Specifically, the lidar device 1b of Modification 2 includes: a time-of-flight measurement device 10b that irradiates the object M with pulsed light ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| emission peak | aaaaa | aaaaa |
| quantum efficiency | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com