Centripetal closing type clamp mechanical gripper
A mechanical claw and closed technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve problems such as the dead point of mechanical claws and the problem of grasping spherical objects, and achieve an easy-to-implement, simple structure, and high portability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
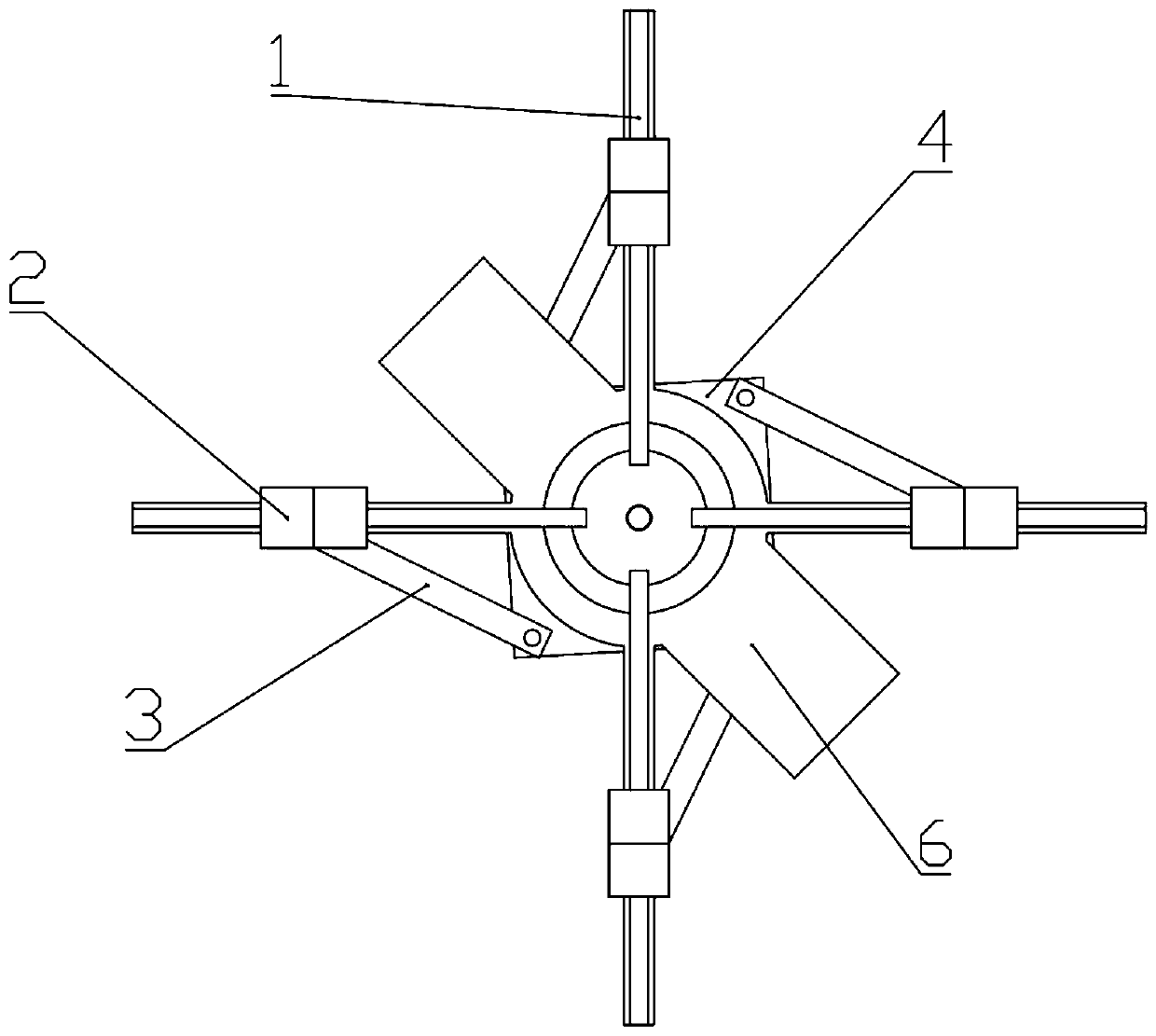
[0029] Combine Figure 1 to Figure 3 , A centripetal closed clamping mechanical claw, including four guide rails 1, four clamping claws 2, four connecting rods 3, a square rudder plate 4, a rudder 5 and a rudder fixed frame 6.
[0030] The steering gear fixing frame 6 includes a bottom plate and two side plates. The two side plates are symmetrically fixed on both sides of the bottom surface of the bottom plate. The steering gear 5 is fixed on the two side plates by bolts. A steering wheel 4 is provided between the bottom plate of the steering gear fixing frame 6 and the steering gear 5, and the output shaft of the steering gear 5 is fixedly connected to the center of the steering gear 4. The four guide rails 1 are evenly distributed on the top surface of the bottom plate. One end of the guide rail 1 is fixed on the bottom plate, and the other end extends out of the bottom plate. Each guide rail 1 is provided with a gripper 2 and four connecting rods 3 are evenly distributed on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com