Wearable soft manipulator with rapid ejection function and preparation method of wearable soft manipulator
A technology of manipulators and software, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of restricting the application of software manipulators and slow response speed, and achieve the effects of high mechanical energy conversion efficiency, fast response speed and strong quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
preparation example Construction
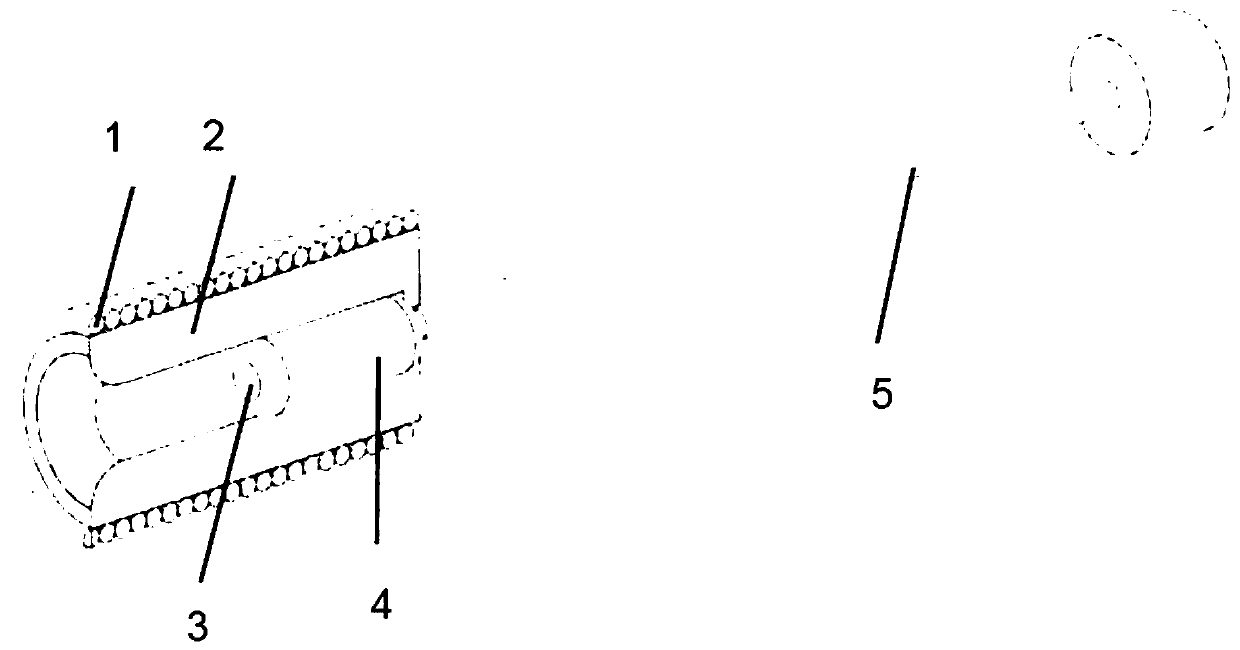
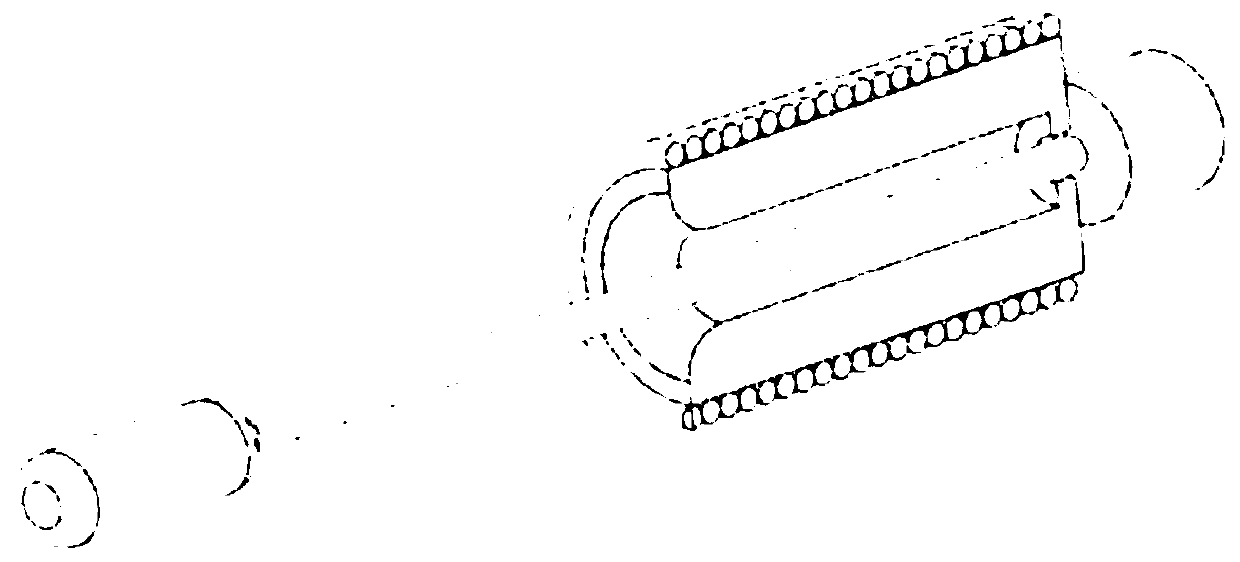
[0036]The preparation method of the wearable soft manipulator with rapid ejection function provided by the present invention mainly includes the following steps: firstly make a soft palm component and a flexible electromagnetic ejection component, and then assemble the flexible electromagnetic ejection component and the soft palm component together to Obtain the wearable soft manipulator.
[0037] Specifically, the preparation method of the soft palm assembly can adopt the following two methods. One way is: use silicon rubber to make the bottom soft covering layer first, and then make a circuit on the bottom soft covering layer. The circuit is mainly It plays the role of connecting the electromagnetic coil and the power supply; after the circuit is made, it is placed for 1 hour, and then the top soft covering layer is prepared on the circuit, thereby obtaining the soft palm assembly. The second way is to realize the preparation of the soft palm component by means of additive m...
Embodiment 1
[0041] (1) Use selective laser melting (Selective laser melting) technology to prepare a small cylindrical iron block, and then use Fused Deposition Modeling (Fused Deposition Modeling) to mold the projectile, and then pour fluid silicone rubber, and then heat it at 60°C Bake in an oven for 6 hours, and finally leave it in the air for 6 hours, and then magnetize the small iron block.
[0042] (2) First make the bottom soft covering, and then make a circuit on the prepared soft covering, the circuit is mainly used to connect the coil and the power supply; after the circuit is made, place it for 1 hour, and then prepare a layer on it Soft covering.
[0043] (3) Assemble the above components to obtain the wearable soft manipulator.
Embodiment 2
[0045] (1) Use selective laser melting (Selective laser melting) technology to prepare a small cylindrical iron block, and then use Fused Deposition Modeling (Fused Deposition Modeling) to make a mold of a flexible electromagnetic projectile, then pour fluid silicone rubber and then Bake in an oven at 60°C for 6 hours, and finally leave it in the air for 6 hours, and then magnetize the small iron block.
[0046] (2) First pile up the bottom covering material, start to make the circuit when it reaches the specified thickness, and keep it for 1 hour after the circuit is made, and then continue to pile up the covering material on the upper layer, and use the method of stacking and illuminating each layer to make each layer as soon as it is piled up. solidify.
[0047] (3) Assemble the above components to obtain the wearable soft manipulator.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com