Underwater UAV positioning method and device based on three-color laser
A positioning method and unmanned aerial vehicle technology, applied in positioning, measuring devices, radio wave measuring systems, etc., can solve problems such as poor visibility, limited positioning time, and difficult to meet underwater rapid positioning, and achieve accurate positioning and low cost. The effect of cost positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
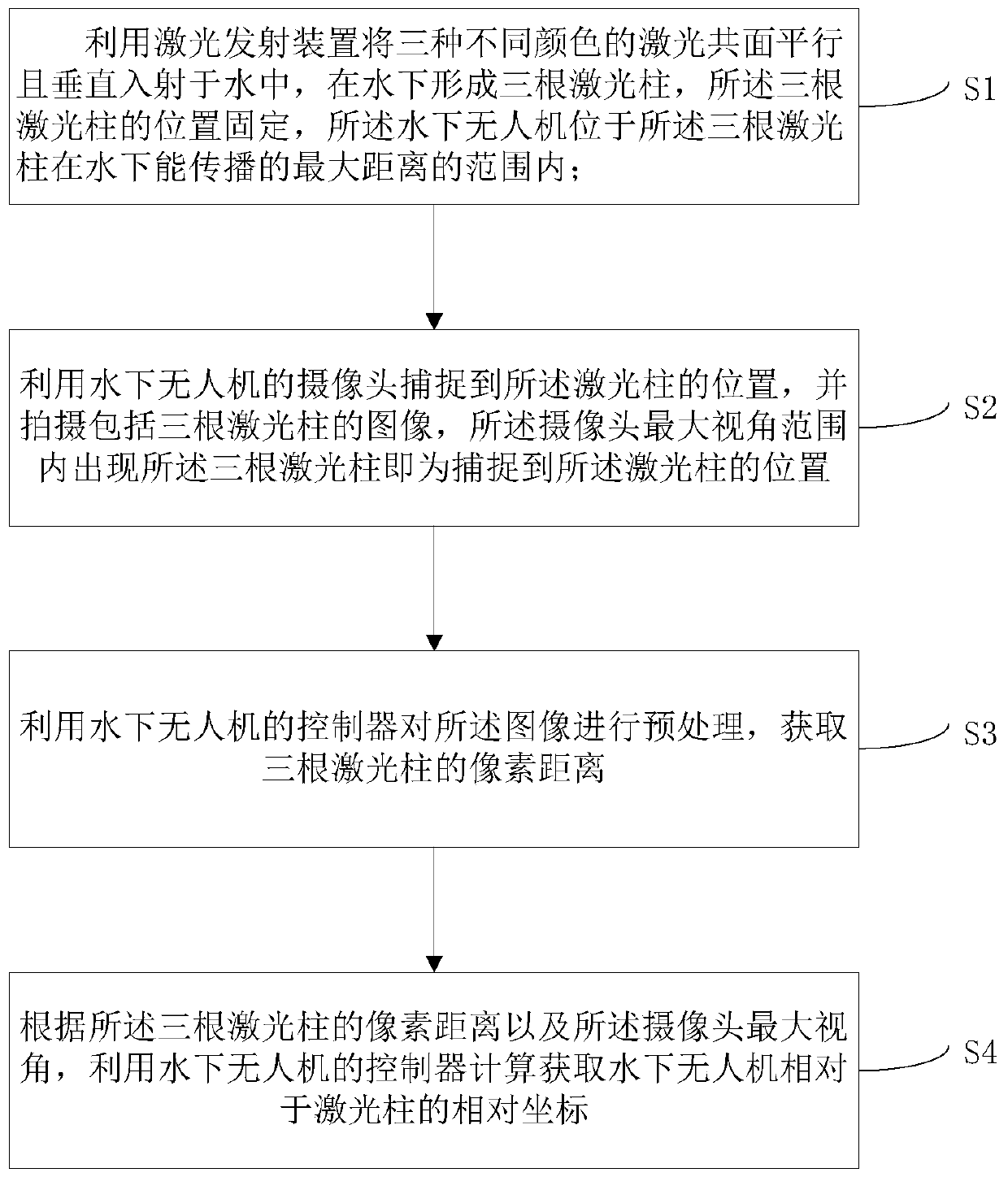
[0044] This embodiment provides a positioning method for underwater drones based on three-color lasers, such as figure 1 , including the following steps:
[0045] S1: Use a laser emitting device to inject three laser beams of different colors into the water in parallel and perpendicularly to form three laser columns underwater. The positions of the three laser columns are fixed, and the underwater drone is located in the three laser beams The laser beam is within the range of the maximum distance that can propagate underwater;
[0046] S2: Use the camera of the underwater UAV to capture the position of the laser column, and take an image including three laser columns, and the appearance of the three laser columns within the maximum viewing angle of the camera is the image of the laser column captured Location;
[0047] S3: Using the controller of the underwater UAV to preprocess the image to obtain the pixel distance of the three laser beams;
[0048] S4: According to the p...
Embodiment 2
[0089] This embodiment provides a positioning device for underwater drones based on three-color lasers, such as Figure 7 , including an underwater unmanned aerial vehicle and a laser emitting device, wherein the laser emitting device emits three different colors of lasers on the water surface, which are coplanar, parallel and perpendicular to the water, and the underwater unmanned aerial vehicle includes a camera and a control device, the controller includes a steering gear and a rotating device, wherein:
[0090] Within the maximum viewing angle range of the camera, the camera acquires an image including three laser beams;
[0091] The steering gear drives the rotation device to rotate, and the rotation angle is 0°-360°. The camera is fixed on the rotation device, and the camera is controlled so that the imaging position of the laser column in the middle of the image captured by the camera is always Located on the center line of the image; the steering gear is mainly compos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com