Positioning method, device and terminal of target point on map
A target point and map technology, applied in the field of navigation data, can solve the problems of map software accuracy loss, positioning error, etc., and achieve the effects of strong reusability, reduced deviation, and simplified coordinate conversion steps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
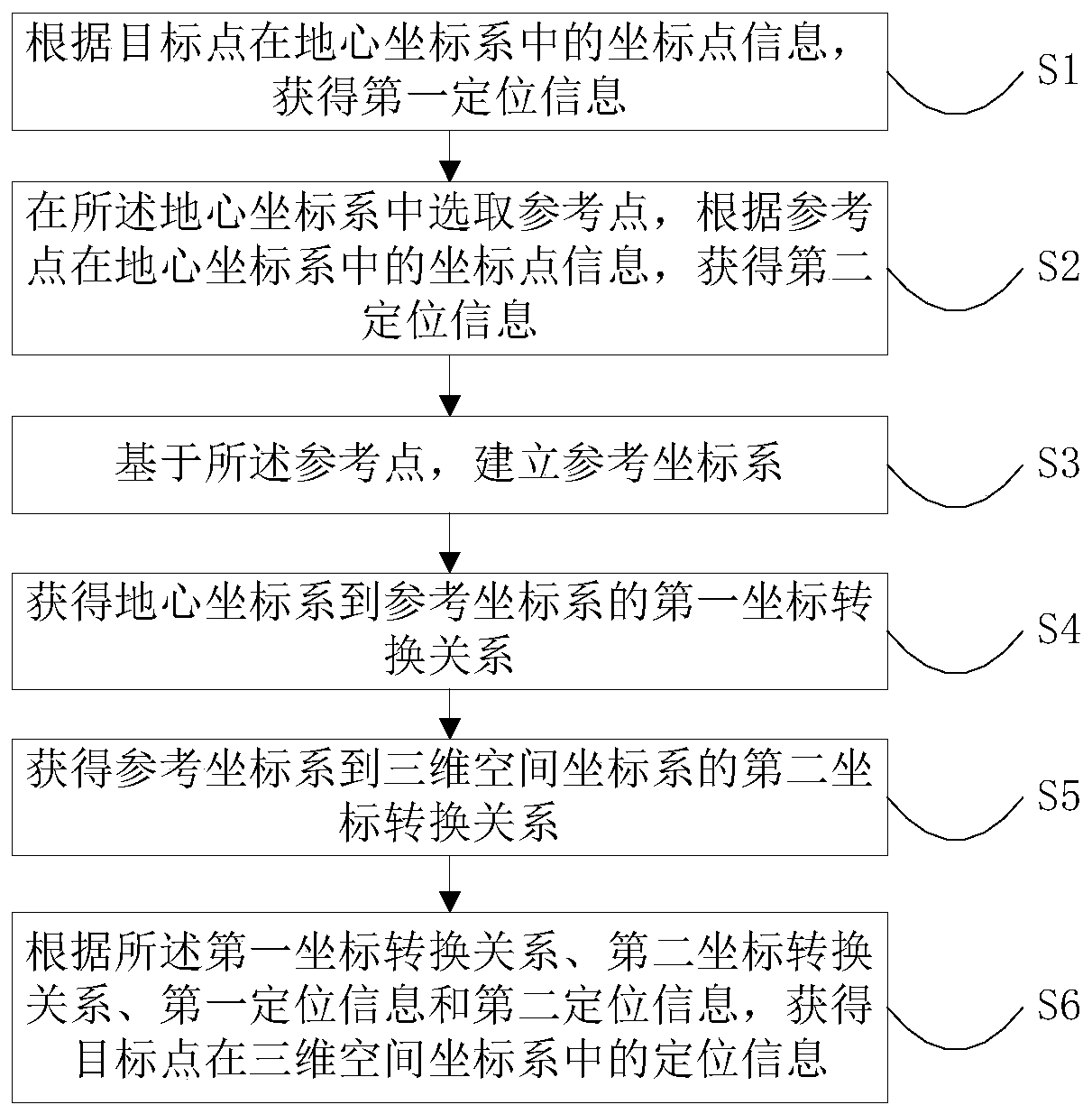
[0063] An embodiment of the present invention provides a method for locating a target point on a map, such as figure 1 As shown, the method includes:
[0064] S1. Obtain first positioning information according to the coordinate point information of the target point in the geocentric coordinate system.
[0065] Specifically, the geocentric coordinate system is an ECEF coordinate system, and the origin (0, 0, 0) of the ECEF coordinate system is defined as the center of mass of the earth.
[0066] The z-axis of the ECEF coordinate system extends through true north, which does not coincide with the instantaneous Earth rotation axis. The x-axis of the ECEF coordinate system intersects the earth at 0° latitude and 0° longitude, so the ECEF coordinate system rotates with the earth, so the coordinates of points fixed on the earth's surface do not change.
[0067] In a specific embodiment, the three-dimensional space coordinate system is defined as selecting one point in the area as ...
Embodiment 2
[0100] An embodiment of the present invention provides a device for locating target points on a map, such as Figure 5 As shown, the device includes: a geocentric coordinate system data storage module 201, a reference coordinate system establishment module 202 and a relocation module 203;
[0101] The geocentric coordinate system data storage module 201 is used to store coordinate point information in the geocentric coordinate system, and the coordinate point information includes first positioning information corresponding to the coordinates of the reference point, and second positioning information corresponding to the coordinates of the target point;
[0102] The reference coordinate system establishment module 202 is used to establish a reference coordinate system based on the reference point;
[0103] The relocation module 203 is used to convert the location information of the target point from the geocentric coordinate system to the three-dimensional space coordinate syst...
Embodiment 3
[0130] An embodiment of the present invention provides a terminal, and the terminal includes the above-mentioned device for locating a target point on a map.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com