A linear calibration system and method based on camera coordinate system
A camera coordinate system and calibration system technology, applied in the field of camera calibration system and its linear calibration algorithm, can solve the problems of increasing difficulty in iterative solution, dependence on calibration accuracy, and unstable calibration results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
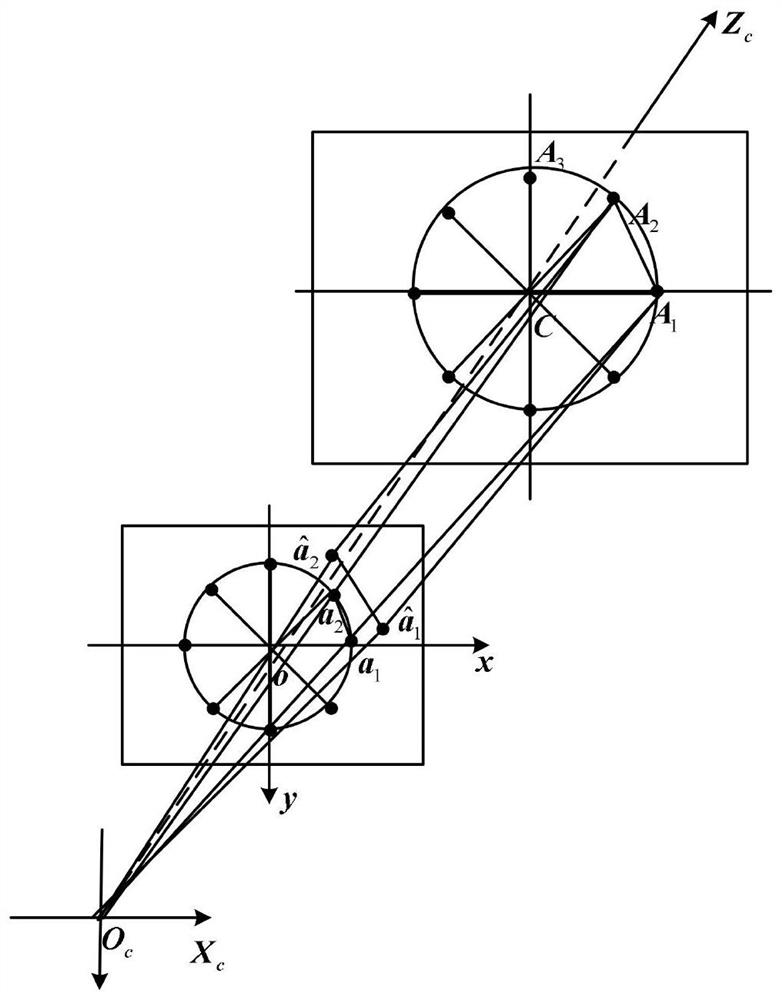
[0056] In this embodiment, a linear calibration system based on a camera coordinate system includes: a coordinate system construction module, an image point position offset estimation module, a focal length calculation module, a camera parameter calculation module, and a target point position calculation module;
[0057] The coordinate system building block is used to set the optical axis center of the camera and the target circle center C on the same horizontal axis, and make the target surface parallel to the camera image plane;
[0058] Take the optical center as the coordinate origin O c , X c Axis and Y c The axes are parallel to the two sides of the camera image, and the optical axis of the camera is Z c Axis, according to the right-hand rule, establish the camera coordinate system O c -X c Y c Z c ;
[0059] Taking the center C of the target circle as the coordinate origin O, the X-axis and Y-axis of the target circle are respectively aligned with the camera coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com