Five-finger robot hand driven by pneumatic muscles
A pneumatic muscle, dexterous hand technology, applied in the field of robotics, can solve the problems of complex structure and additional driving force for finger movement, and achieve the effect of reducing energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
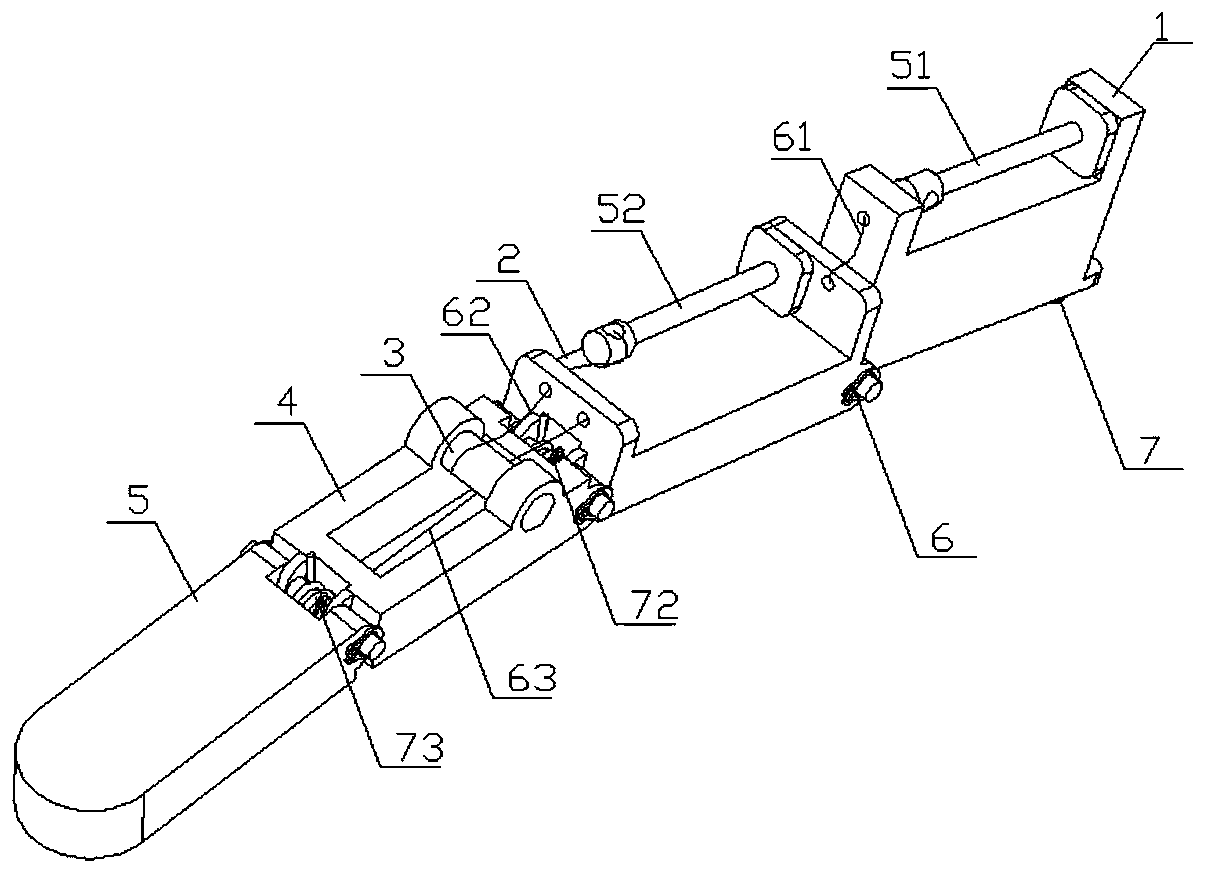
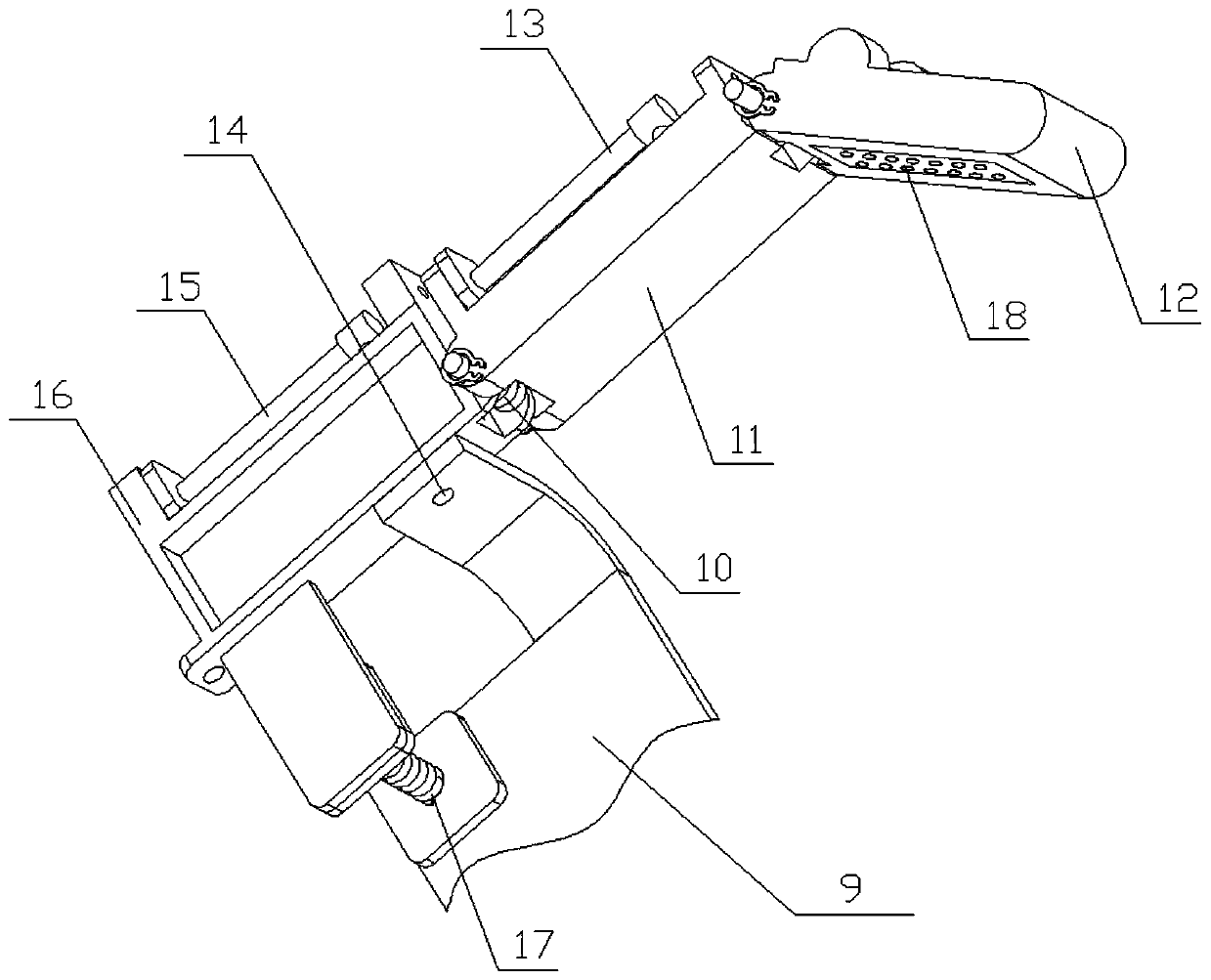
[0025] refer to Figure 1 to Figure 7 , a five-finger dexterous hand driven by pneumatic muscles is mainly composed of a connecting flange 9; Curved single finger; a thumb consisting of the distal end of the thumb 12, the proximal end of the thumb 11 and the metacarpal bone of the thumb 16; pneumatic muscles and other subsidiary mechanical mechanisms.
[0026] The connecting flange 9 is used as a carrier, and the front end is pin-connected with the thumb metacarpal bone 16 and the curved single-finger metacarpal bone 1 through the thumb pin 14 and the curved single-finger pin 7 respectively. Through holes for interconnection with other objects, such as industrial robots. Name the curved fingers index finger, middle finger, ring finger, and little finger. The index finger and middle finger are fixedly connected to both ends of the single-finger swing joint pneumatic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com