A model-free angle control method with variable gain of knee exoskeleton based on pso
A control method and angle control technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of data-driven methods, many constraints, inability to resist interference, inconsistent estimated step size, etc., to facilitate computer programming and improve control accuracy. , the theoretical effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
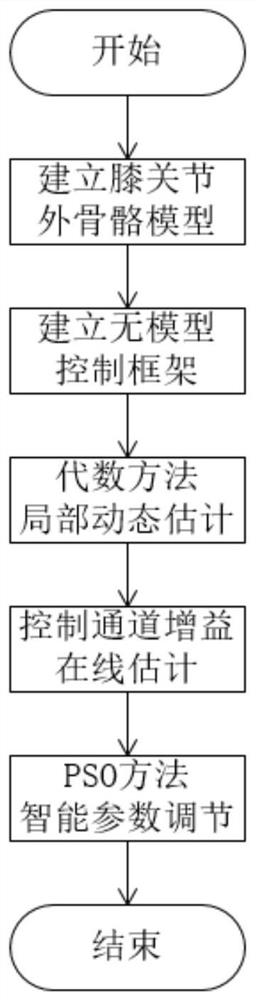
[0095] Step 1. Establish an impedance model of the knee joint exoskeleton robot in simulink. Firstly, the drive mode of the knee exoskeleton robot is selected, and the motor drive mode is selected, using a brushless DC motor. Then choose the knee joint link form, install the motor on the outside of the knee joint, and use the human-machine synchronous link, that is, the human body movement and force are consistent with the exoskeleton. The thigh and calf exoskeleton of the knee joint is made of aluminum alloy, which can be stretched and weighs about 5kg.
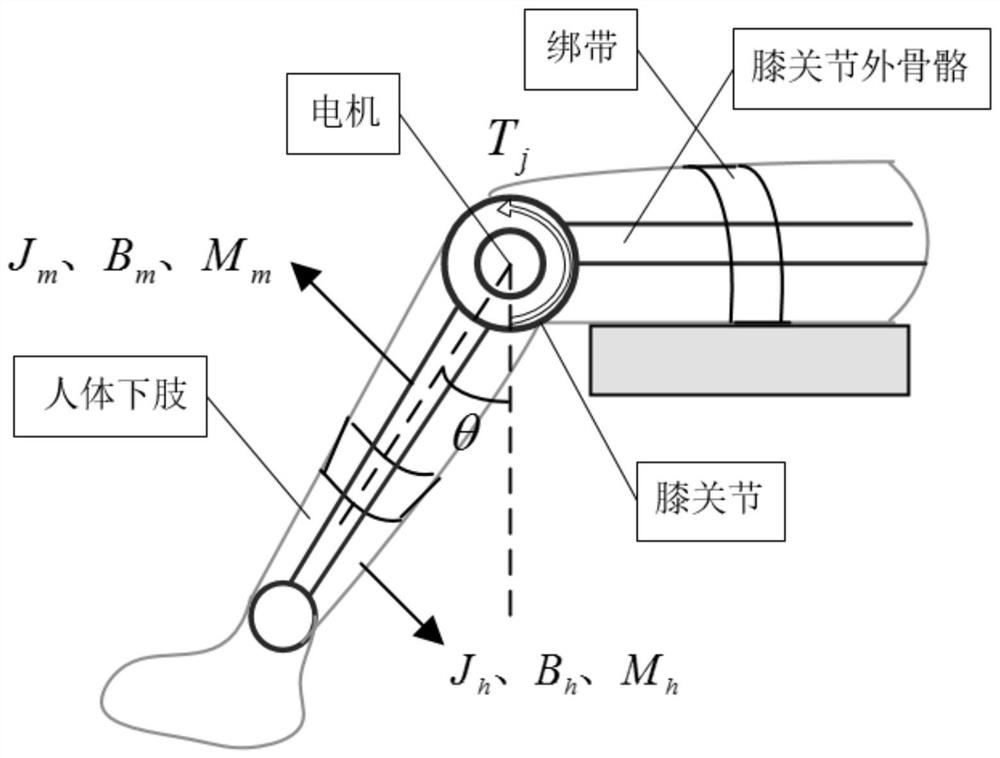
[0096] 1.1. Establish the impedance model of the knee exoskeleton:
[0097]
[0098] Among them, J o is the moment of inertia of the knee joint exoskeleton; θ j is the motion angle of human knee joint; B o is the damping coefficient of the knee exoskeleton; T j is the torque of the knee exoskeleton, provided by the motor; G o (θ j ) is the gravity expression of the knee joint exoskeleton, specifically M o gl o s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com