Multi-target point path planning method based on fast random search tree
A random search and path planning technology, applied to road network navigators, navigation calculation tools, etc., can solve problems such as non-optimal paths, and achieve the effect of fast exploration and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will be further described in conjunction with the specific implementation process below.
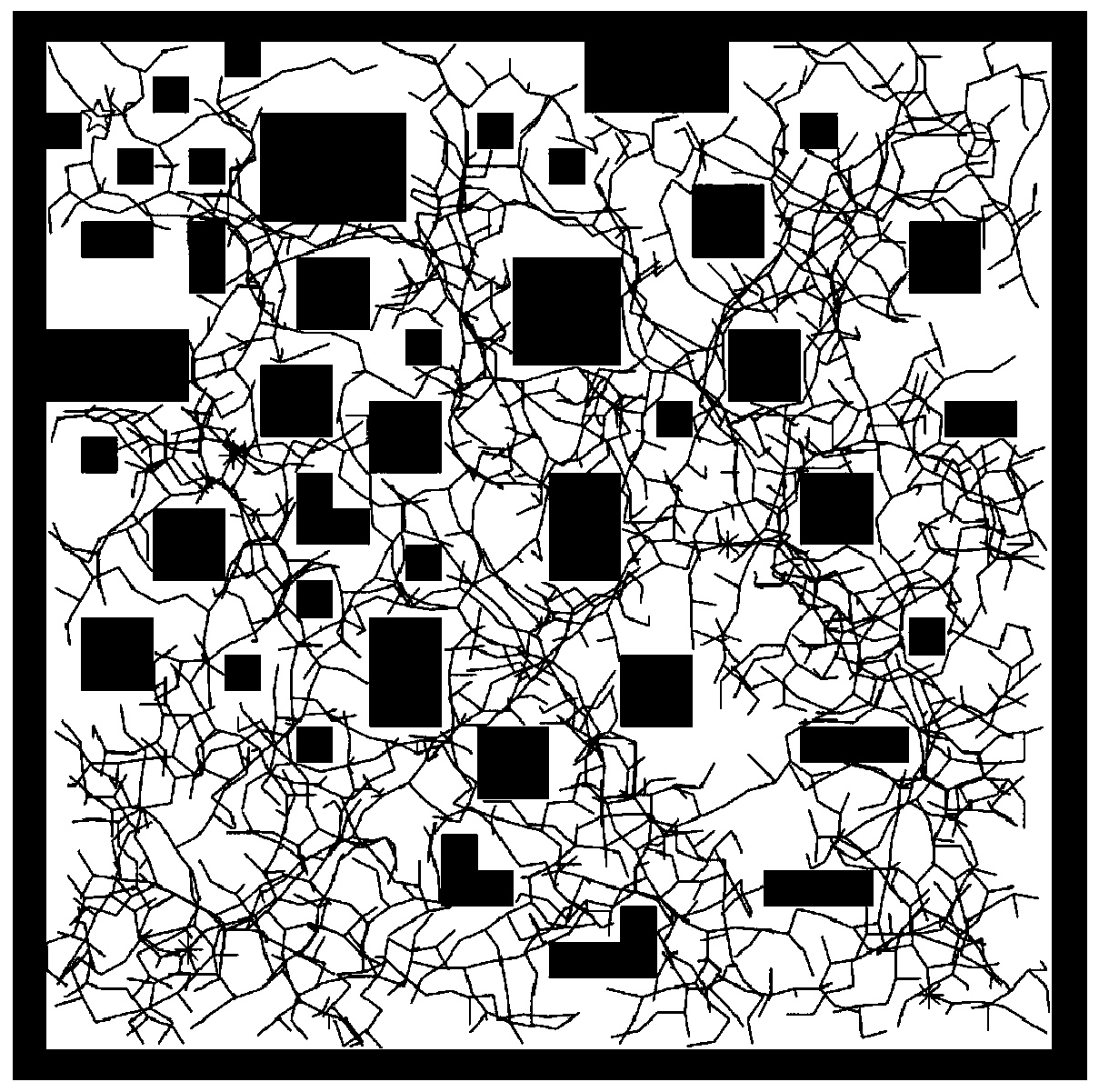
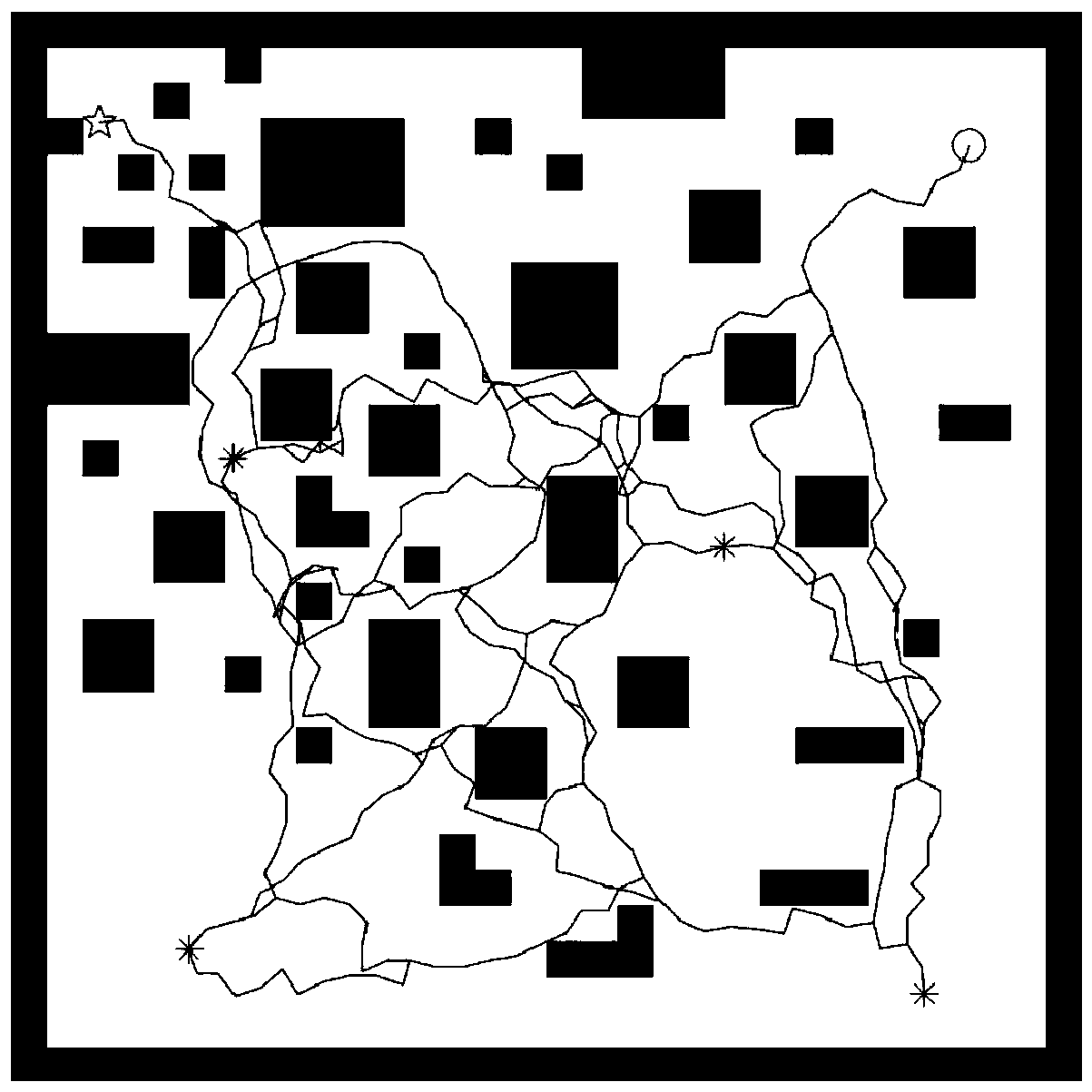
[0044] Preparations: The environment map is 480×480, and the starting point is set to X start =(50,40), represented by a five-pointed star point, the end point is X end =(60,430), represented by the circle point, and set four target points X 1 =(440,410),X 2 =(420,80),X 3 =(240,320),X 4 =(200,100), which are represented by four asterisk points. The location and size of obstacles are set as figure 1 shown.
[0045] Step 1: Initialize a tree for each target point, and determine the perception distance based on the information in the global map
[0046] Leave. Algorithm
[0047] The method is as follows:
[0048] R=min{D ij},1≤i,j≤n
[0049] where R stands for perception distance, D ij Represents the obstacle-ignoring Euclidean space distance between the root node of the i-th tree and the root node of the j-th tree, and n represents the total number...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com