A Multi-target Path Planning Method Based on Fast Random Search Tree
A random search and path planning technology, applied to road network navigators, navigation calculation tools, etc., can solve problems such as non-optimal paths, and achieve the effect of fast exploration and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0043] The present invention will be further described in conjunction with the specific implementation process below.
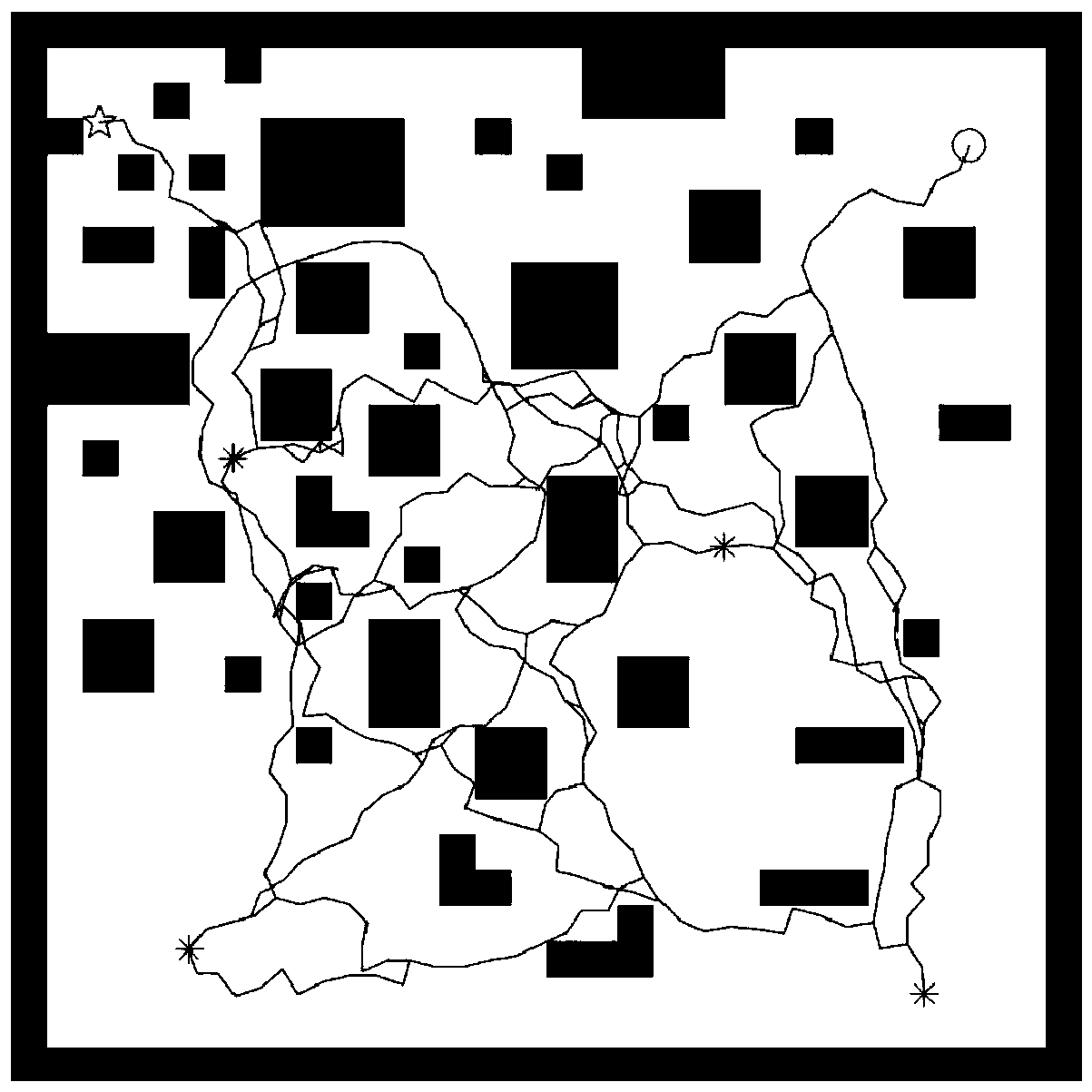
[0044] Preparations: The environment map is 480×480, and the starting point is set to X start =(50,40), represented by a five-pointed star point, the end point is X end =(60,430), represented by the circle point, and set four target points X 1 =(440,410),X 2 =(420,80),X 3 =(240,320),X 4 =(200,100), which are represented by four asterisk points. The location and size of obstacles are set as figure 1 shown.
[0045] Step 1: Initialize a tree for each target point, and determine the perception distance with the information in the global map. The calculation method is as follows:
[0046] R=min{D ij},1≤i,j≤n
[0047] where R stands for perception distance, D ij Represents the obstacle-ignoring Euclidean space distance between the root node of the i-th tree and the root node of the j-th tree, and n represents the total number of trees, that is, the tota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com