High-precision positioning parking method for unmanned container truck relative to automatic field bridge
A container truck and unmanned driving technology, which is applied in the field of unmanned vehicles, can solve the problems of GPS/Beidou positioning error increase, offset, and the inability to correctly complete the loading and unloading operations, so as to reduce the number of adjustments and achieve accurate positioning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0026] The specific implementation of the present invention will be described in detail below in conjunction with preferred embodiments.
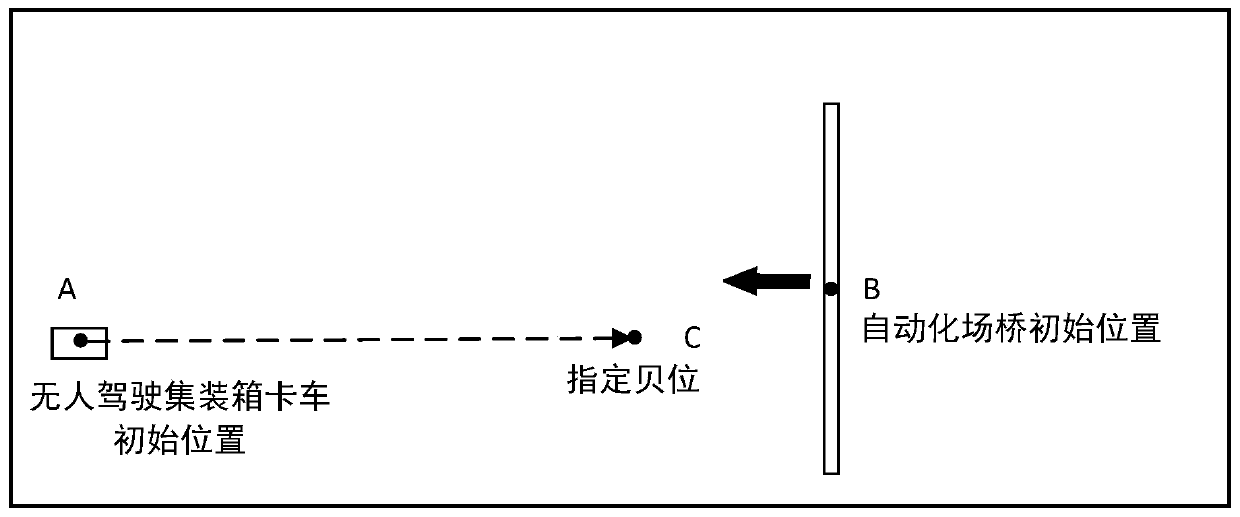
[0027] See the accompanying drawings for details. This embodiment provides a high-precision positioning and parking method for unmanned container trucks relative to automated yard bridges. Laser radar and visual sensors are used to adjust the relative positioning interval between unmanned container trucks and automated yard bridges. to within 10 meters; through the automatic yard bridge trailer positioning detection information, the mutual position between the unmanned container truck and the automated yard bridge is corrected, and the positioning information interaction between the driverless container truck and the automated yard bridge is increased. Positioning information, using the positioning finite state machine and stepping parking controller, realizes high-precision positioning of unmanned container truck automation yard and bridge ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com