Braille interaction system based on ultrasonic touch and interaction method thereof
An interactive system, tactile technology, applied in the input/output of user/computer interaction, instrument, mechanical mode conversion, etc., can solve the problem that the hand position scanning circuit cannot distinguish between the palm or the wrist or other objects, and is vulnerable to external interference. , inability to work at the same time, etc., to achieve the effect of being conducive to widespread use, ingenious architectural design, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
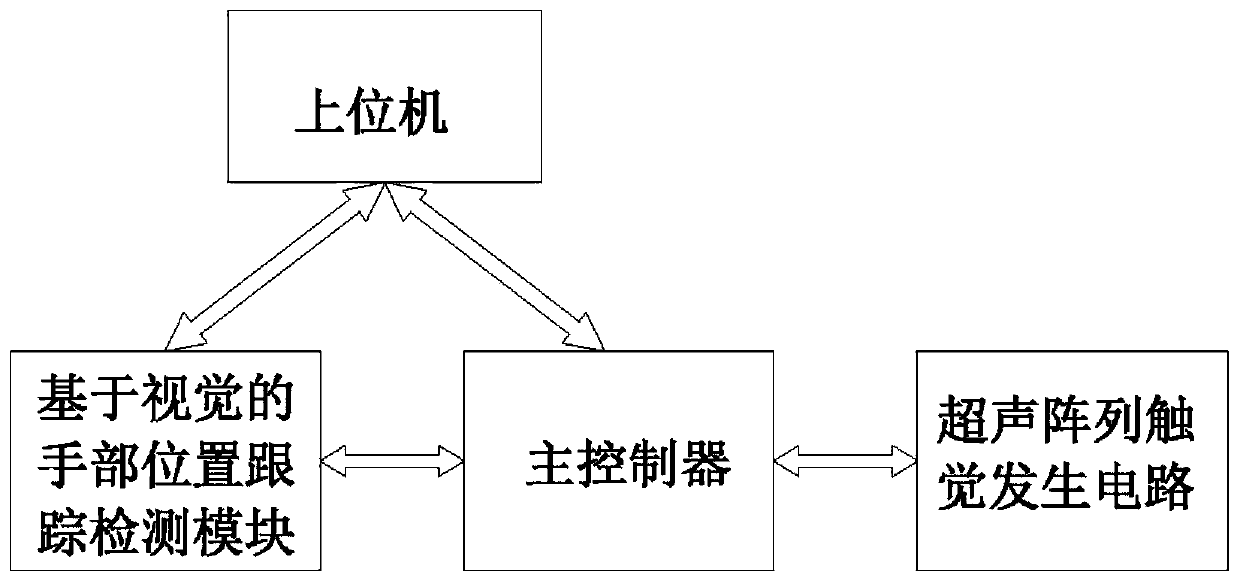
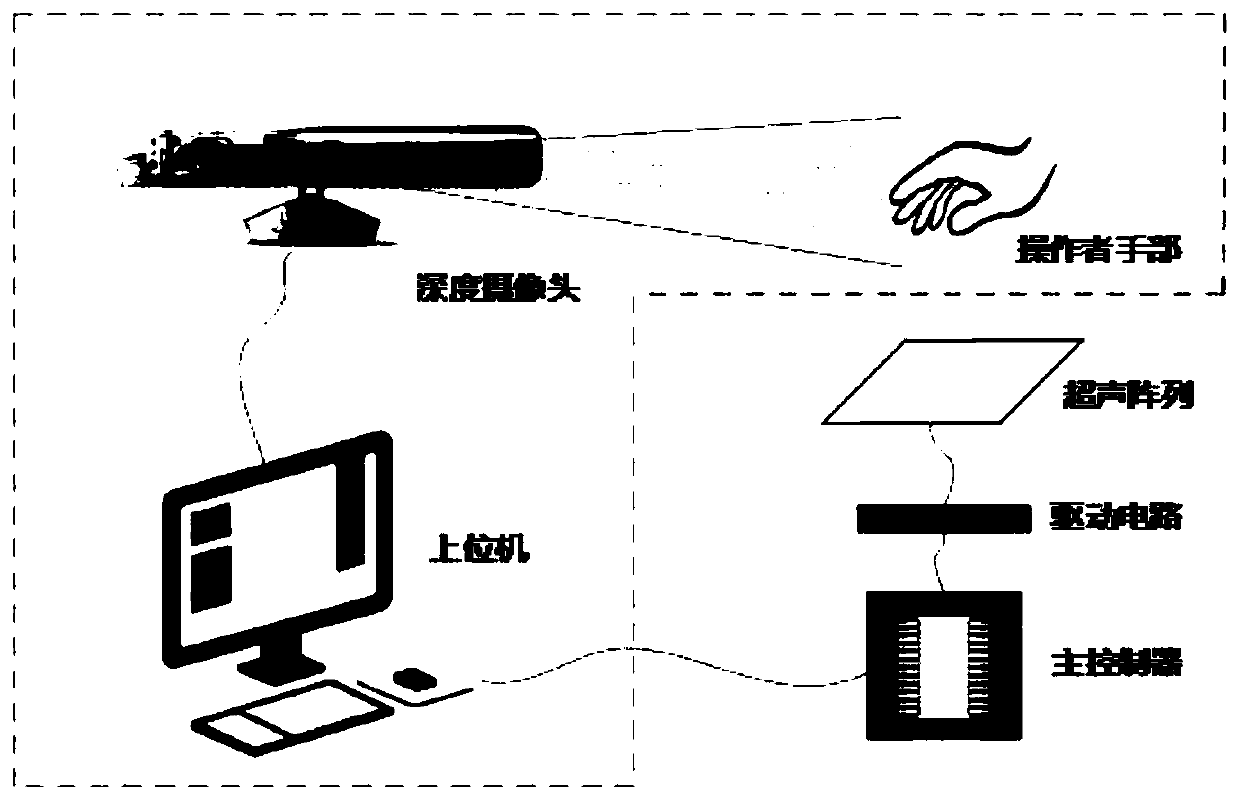
[0030] see Figure 1 to Figure 5 , the present embodiment provides an ultrasonic tactile-based Braille interactive system, which includes a host computer, a vision-based hand position tracking detection module, a main controller and an ultrasonic array tactile generation circuit.
[0031] The host computer is used to set the expected Braille sequence and generate Braille information; the vision-based hand position tracking and detection module is used to collect continuous video frames and send them to the host computer, and perform an algorithm on the image through the host computer The processing realizes the extraction of the operator's hand space position coordinates and generates the corresponding hand space position coordinate information and transmits it to the main controller; the main controller uses the Braille information generated by the host computer and the calculated hand space position coordinate information to Determine the Braille feedback area, and then calc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com