Fruit and vegetable picking robot and control method thereof
A technology for picking robots and control methods, applied in the field of robot mechanism design, to achieve the effects of improving efficiency, facilitating automatic operation, and high measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, and the present invention is not limited to the following embodiments.
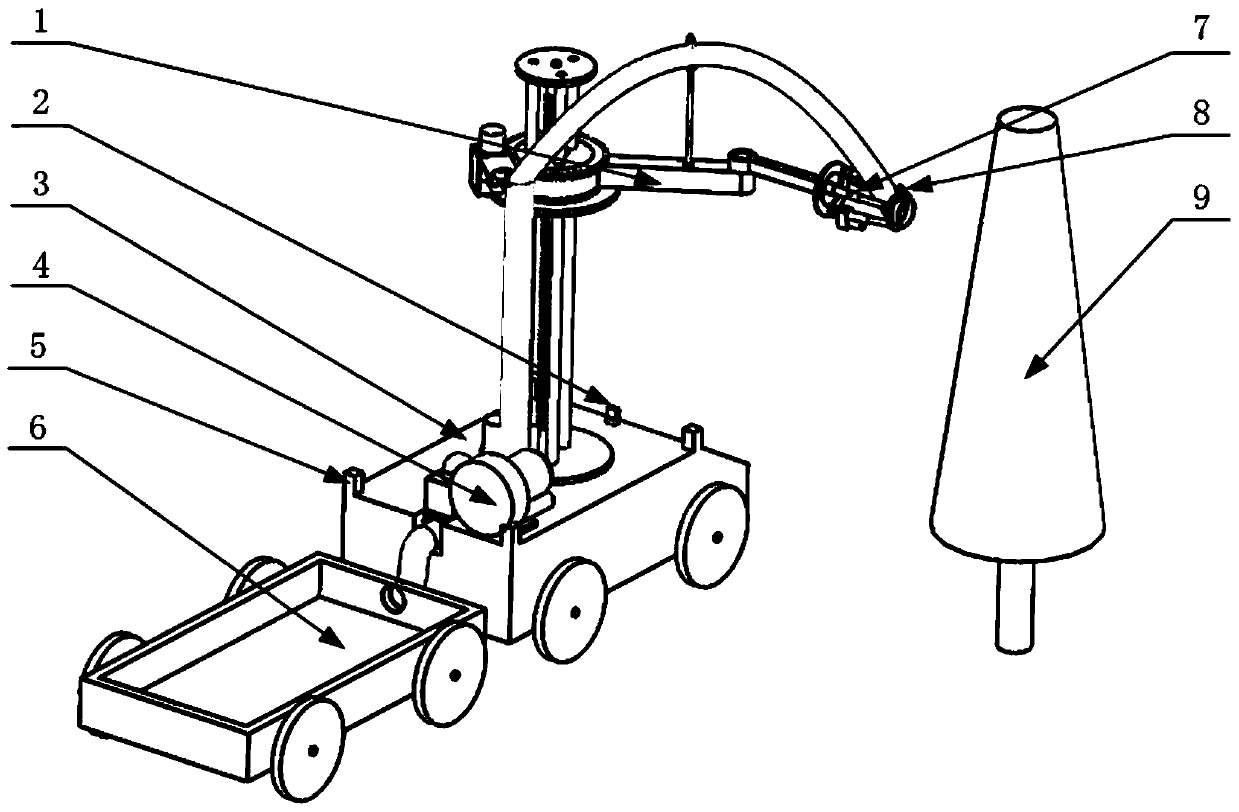
[0045] Such as figure 1 Shown, a kind of fruit and vegetable picking robot of the present invention (below taking apple picking as example to illustrate), comprises mobile platform 3, picking mechanical arm 1, picking hand 7, control system and trailer 6;
[0046] The mobile platform 3 is used to realize the mobile walking of the picking robot, and drags the trailer 6 to move, and its walking mode can adopt a form suitable for walking in the orchard such as crawler type, wheel type, or leg type; the mobile platform 3 adopts soft differential speed of two power wheels The driving mode is soft differential, which means that the two wheels rotate independently, and the control system adjusts the speed of the two wheels to realize the turning or straight driving of the platform....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com