Path Planning Method for Mobile Robot Based on Whale Optimization Algorithm
A mobile robot, optimization algorithm technology, applied in two-dimensional position/channel control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
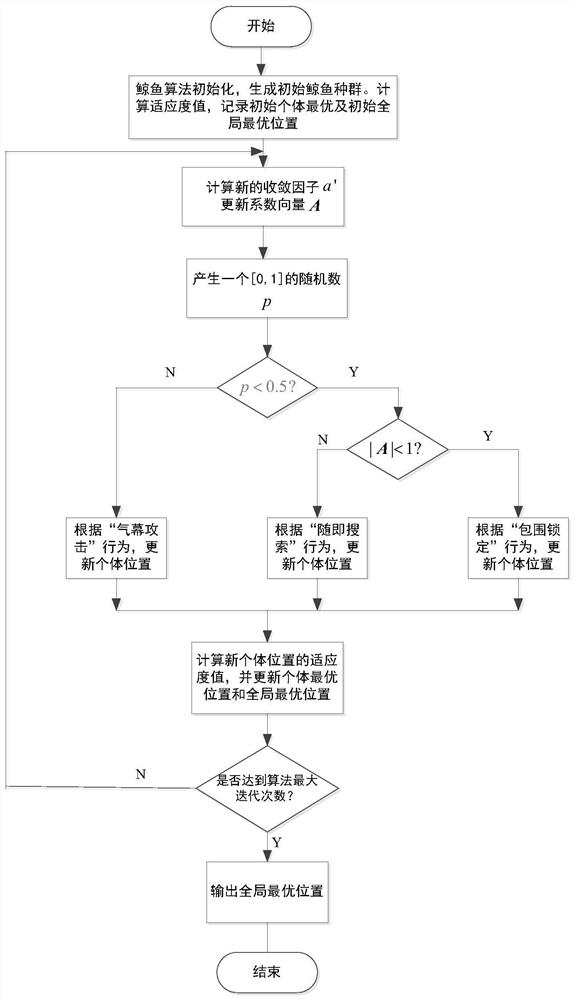
[0040] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings in the embodiments of the present invention.
[0041] see figure 1 , the present invention provides a mobile robot path planning method based on the whale optimization algorithm, comprising the following steps:
[0042] S1, initialize the whale optimization algorithm, set the parameters of the algorithm, set the number of whale populations to N, and set the maximum number of iterations to t max .
[0043] The selected fitness function is:
[0044]
[0045] where X i is the position of the ith whale, n represents the dimension of the individual whale in the search space, (x n ,y n ) represents the coordinates of the nth-dimensional whale individual on the grid map. Similarly, (x n+1 ,,y n+1 ) represents the coordinates of the n+1th dimension whale individual on the grid map. Represents the dimension of the whale population.
[0046]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com