


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A vision-based robot navigation method for agricultural and forestry parks
A navigation method and robot technology, which is applied in the field of vision-based robot navigation in agricultural and forestry parks, can solve the problems of inability to accurately locate GPS and inability to turn around accurately between lines, and achieve the effects of realizing correct navigation, eliminating constraints, and simplifying navigation algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Embodiments of the present invention are described below with reference to the drawings, in which like parts are denoted by like reference numerals. In the case of no conflict, the following embodiments and the technical features in the embodiments can be combined with each other. Below take orchard as an example to describe the present invention, but in forest area, the present invention is applicable equally.
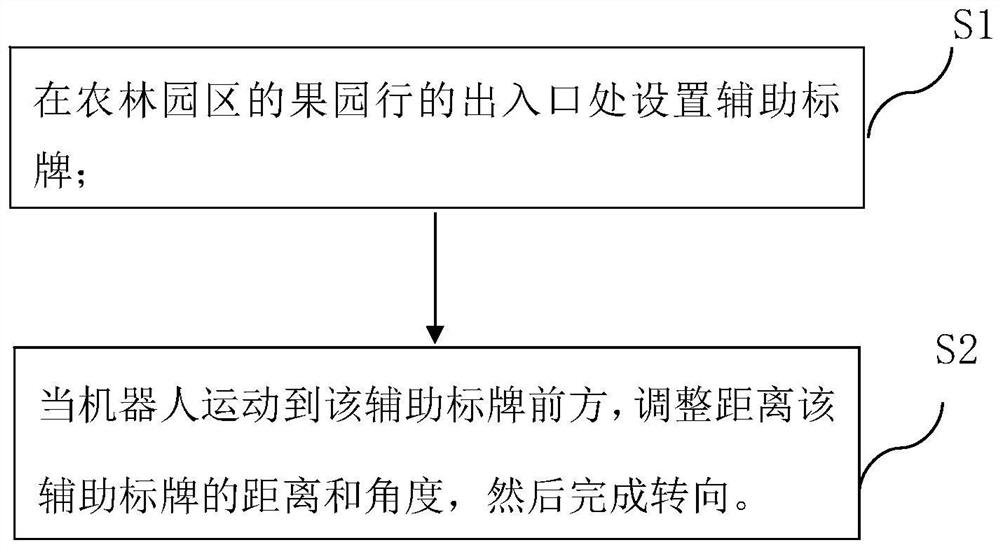
[0022] Such as figure 1 An embodiment of the method of the present invention is shown, and the method of the present invention includes: S1, setting auxiliary signs at the entrances and exits of orchard rows in the agricultural and forestry park. S2, when the robot moves to the front of the auxiliary sign, adjust the distance and angle from the auxiliary sign, and then complete the turning.
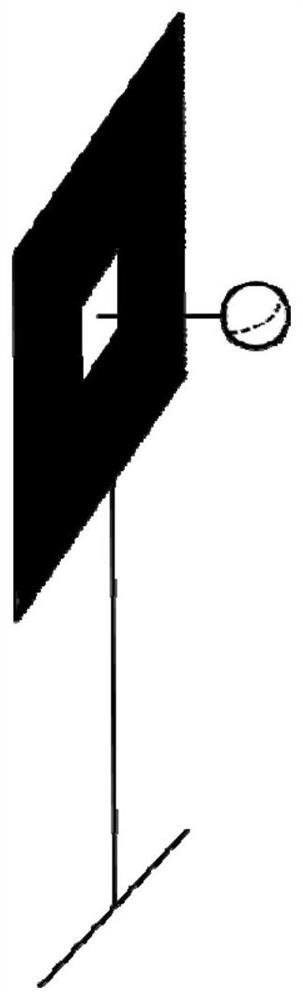
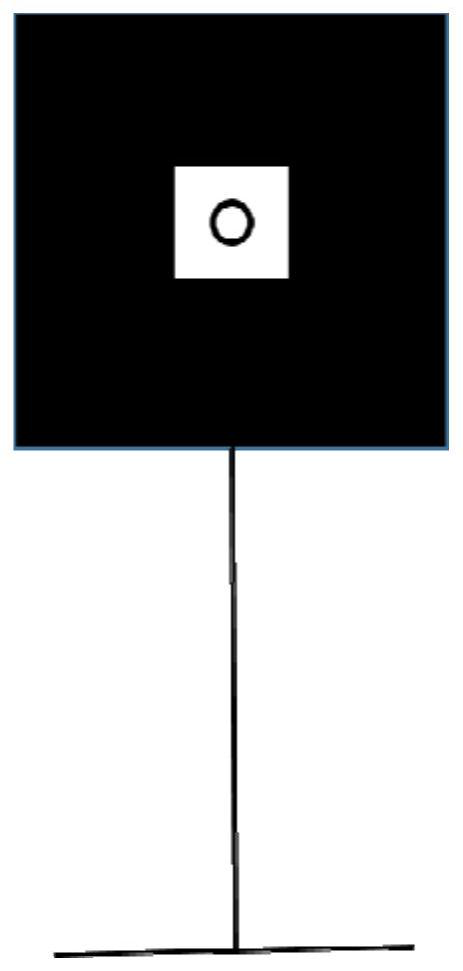
[0023] In one embodiment, the appearance of the auxiliary signage can have a special design, such as Figure 2-Figure 5 shown. The auxiliary sign adopts a graphic with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com