Unmanned aerial vehicle time-division control method
A time-sharing control and unmanned aerial vehicle technology, applied in attitude control and other directions, can solve the problems of small aircraft speed, small rudder effect, and can not guarantee the smooth and safe switching between the take-off section and the cruise section, and achieves a simple form, ensures the safety of the aircraft, Ease of engineering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
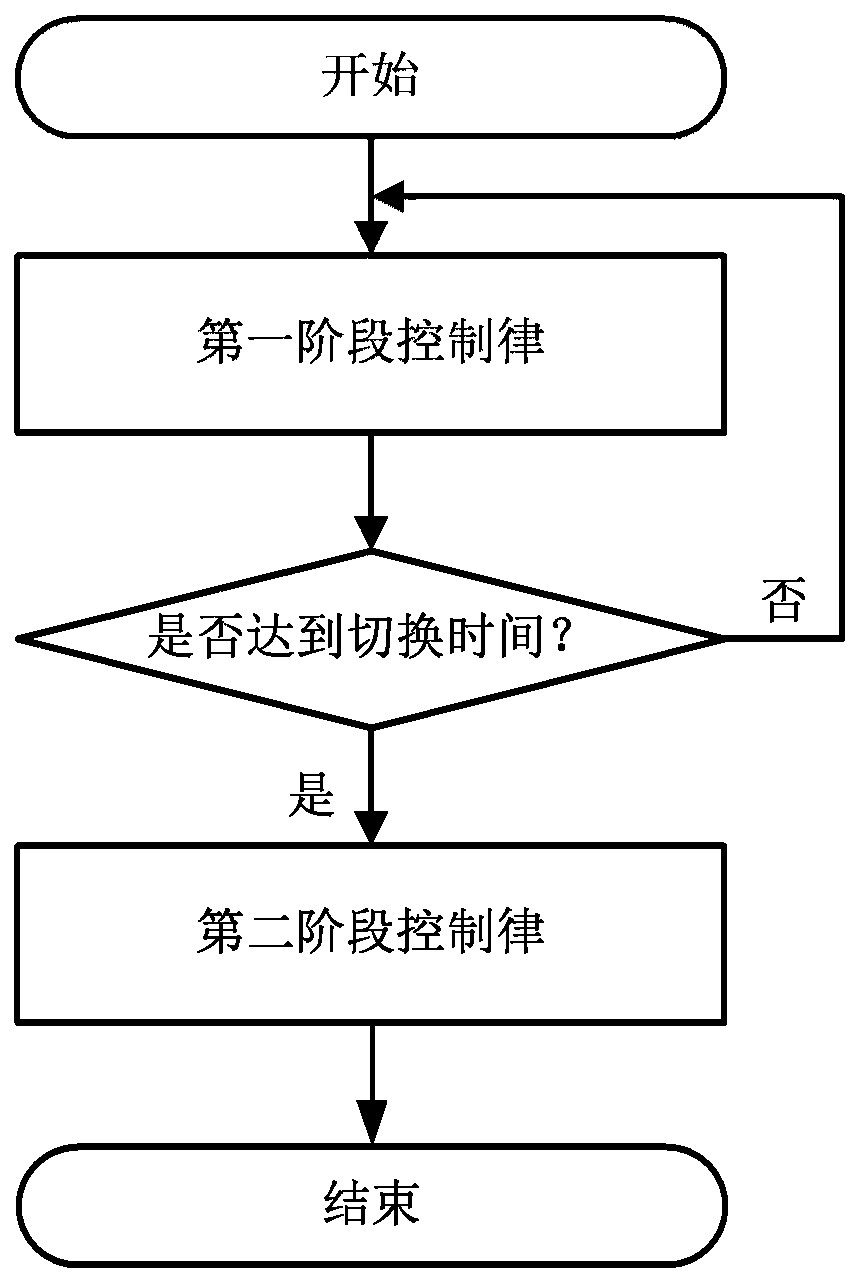
[0025] Based on the following problems existing in the existing technology: for the UAVs that take off from the aerostat platform, the stage of swooping to level flight after launching is different from the conventional ground-sliding UAVs. There is a relatively large pitch angle, and this stage is a transition process from a dive to a level flight with a relatively drastic attitude change. Improper design of the control law will bring a large overload and bring great challenges to the aircraft structure design; the second is , the initial speed of the aircraft is very small, and the rudder effect is very small. As the speed increases, the rudder effect gradually increases. How to choose the appropriate pull-up time can ensure that the attitude changes and overload changes during the whole process will not be too drastic. , to avoid aircraft attitude instability or structural damage. The invention provides a time-sharing control method for unmanned aerial vehicles. According t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com