A precision pointing platform based on flexible parallelogram mechanism
A parallelogram and flexible technology, applied in the direction of machine/support, supporting machine, mechanical equipment, etc., can solve the problems of output platform rotation center drift, driver harmful lateral motion isolation, axial and lateral parasitic motion, etc. Achieve the effect of avoiding temperature drift error, reducing adverse effects, and reducing lateral displacement transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and together with the embodiments of the present invention are used to explain the principle of the present invention and are not intended to limit the scope of the present invention.
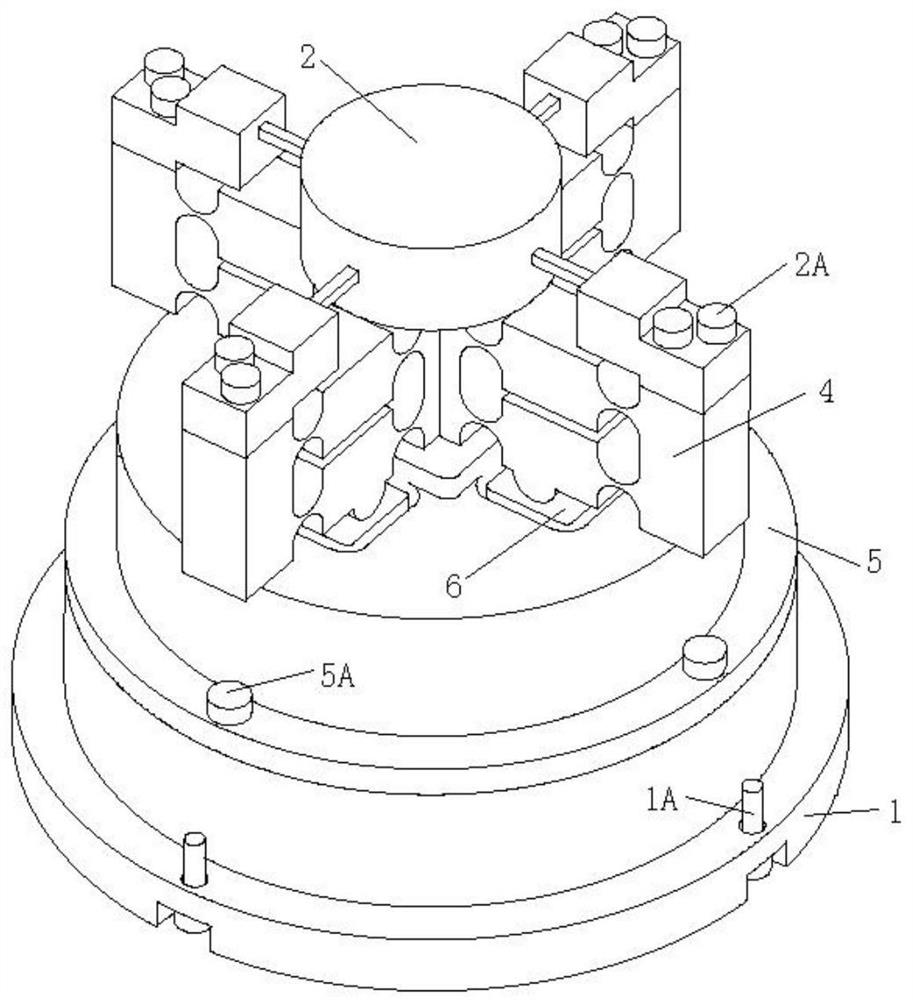
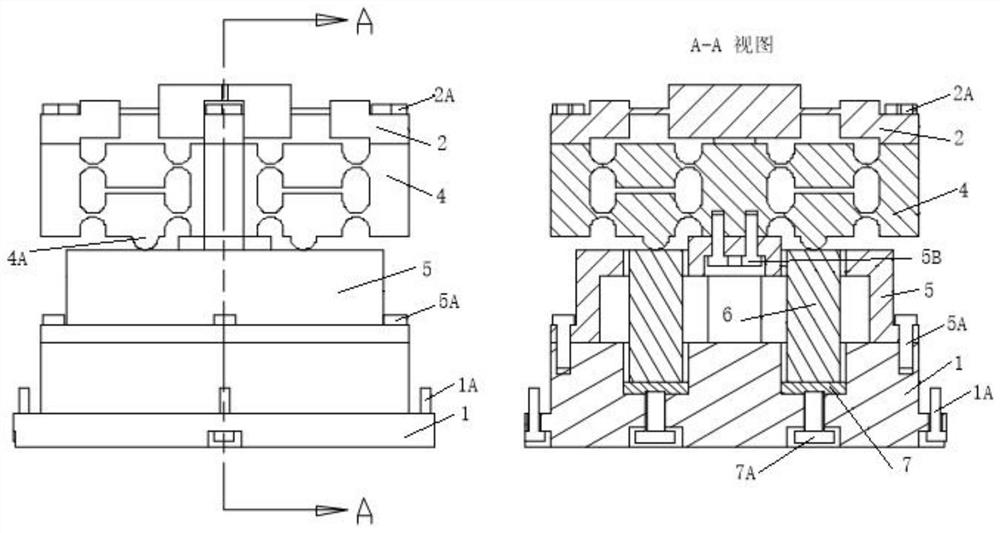
[0046] The object of the present invention is to provide a precision pointing platform device based on a flexible parallelogram mechanism. The precise pointing platform device can complete the two-dimensional deflection function in space. The invention adopts a piezoelectric ceramic driver as a driving input, and realizes pointing motion guidance by constructing a flexible parallelogram rotating guide mechanism. The four parallelogram branch chains of the pointing platform are distributed symmetrically at 90°, forming a four-point parallel drive configuration, which can effectively reduce prelo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com