Nonlinear robust control method used for posture control of small unmanned helicopter
An unmanned helicopter, robust control technology, applied in attitude control, general control system, adaptive control, etc., can solve the problem of lack of theoretical proof for the stability of the closed-loop system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
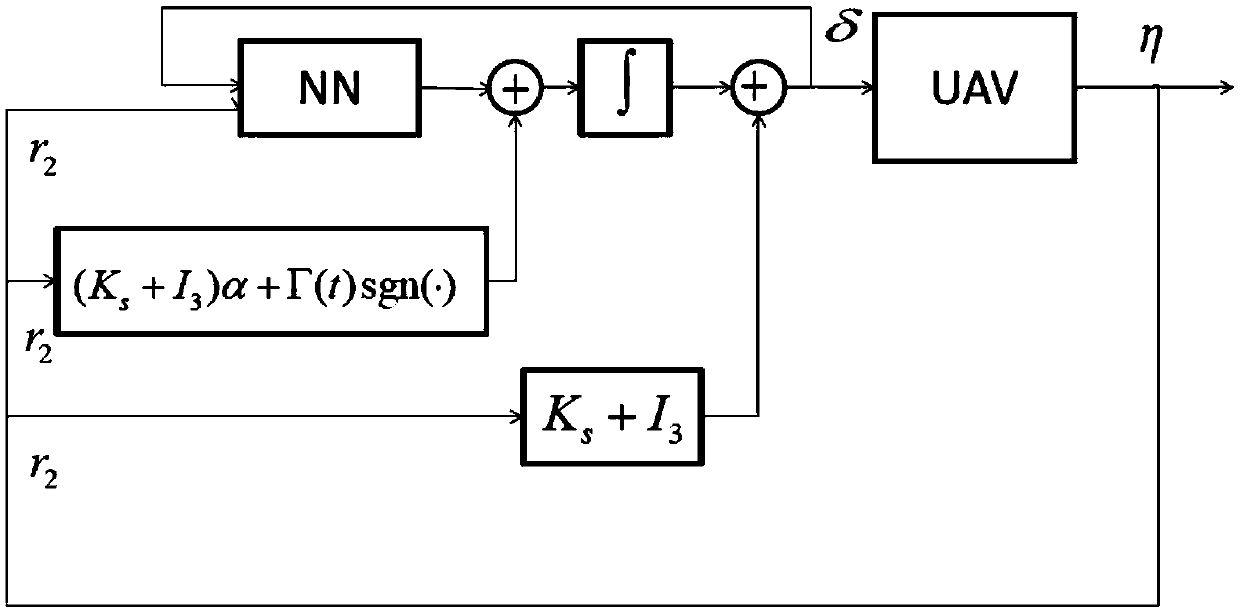
[0061] The invention aims to provide a continuous nonlinear robust control method, which can keep the flight attitude stable even when the small helicopter has system parameter uncertainty and external disturbance. For this reason, the technical scheme that the present invention adopts is, based on the robust control algorithm of error sign function integral, in conjunction with neural network algorithm, in the attitude system control that is used for small-sized man-machine without helicopter, comprises the following steps:
[0062] Step 1) determine the coordinate system definition of small unmanned helicopter;
[0063] The definition of the small unmanned helicopter coordinate system mainly involves two coordinate systems, the inertial coordinate system {I}={O I ,x I ,y I ,z I} and body coordinate system {B}={O B ,x B ,y B ,z B}, where O i (i=I,B) represents the origin of the coordinate system, x i ,y i ,z i (i=I, B) respectively correspond to the unit vectors in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com