Four-ring inertial stabilization platform frame zero calibration method
A technology for stabilizing the platform and four-ring inertia, applied in the direction of measuring devices, instruments, etc., can solve problems such as the parallelism between the frame axis and the accelerometer axis, and the deviation of the frame output.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] Below in conjunction with accompanying drawing, method of the present invention will be further described:
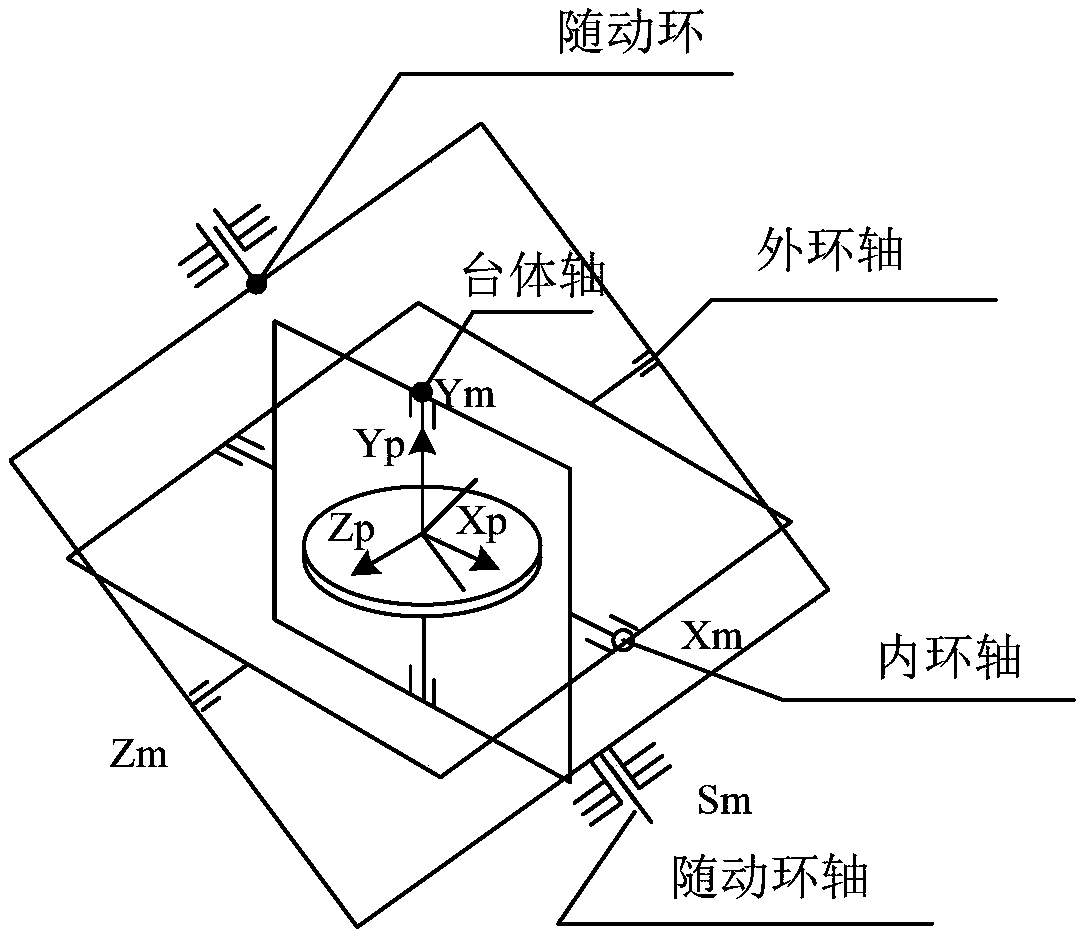
[0035] After the frame of the four-ring inertial stable platform is reset to zero, the frame and platform are installed as follows: figure 1 shown. The three accelerometers are installed on the table body. After the accelerometers are error compensated, the sensitive axes of the three accelerometers coincide with the table body coordinate system oXp, oYp, and oZp respectively, and the three axes are orthogonal to each other. Ideally, the accelerometer sensitive axes oXp, oYp, and oZp are parallel to the inner ring axis oXm, the table body axis oYm, and the outer ring axis oZm, respectively, and the follower ring axis oSm is parallel to oXm and oXp. In general, the accelerometer installation error compensation is more accurate and can ensure that oYp and oYm coincide, but there are deviations between the accelerometer sensitive axes oXp and oZp and the frame axes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com