Robot hand-eye calibration method
A technology of robot hand and calibration method, which is applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., and can solve the problems of industrial robot parameter errors and low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following is a comparison with the accompanying drawings, through the description of the embodiments, the specific embodiments of the present invention will be further elaborated, the purpose is to help those skilled in the art have a more complete, accurate and in-depth understanding of the concept of the present invention, technical solutions, and contribute to its implementation.
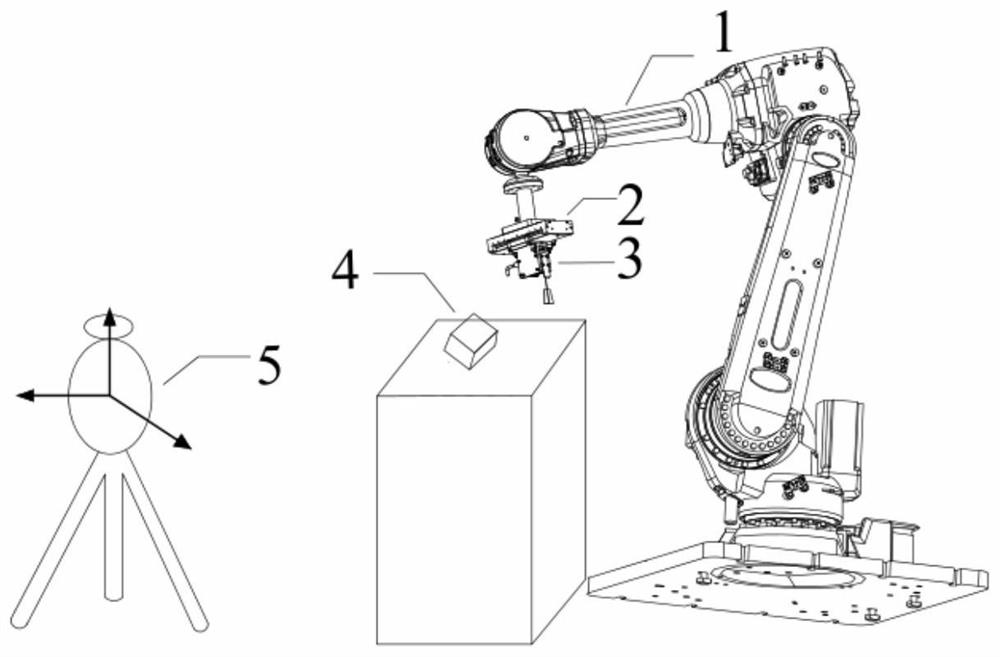
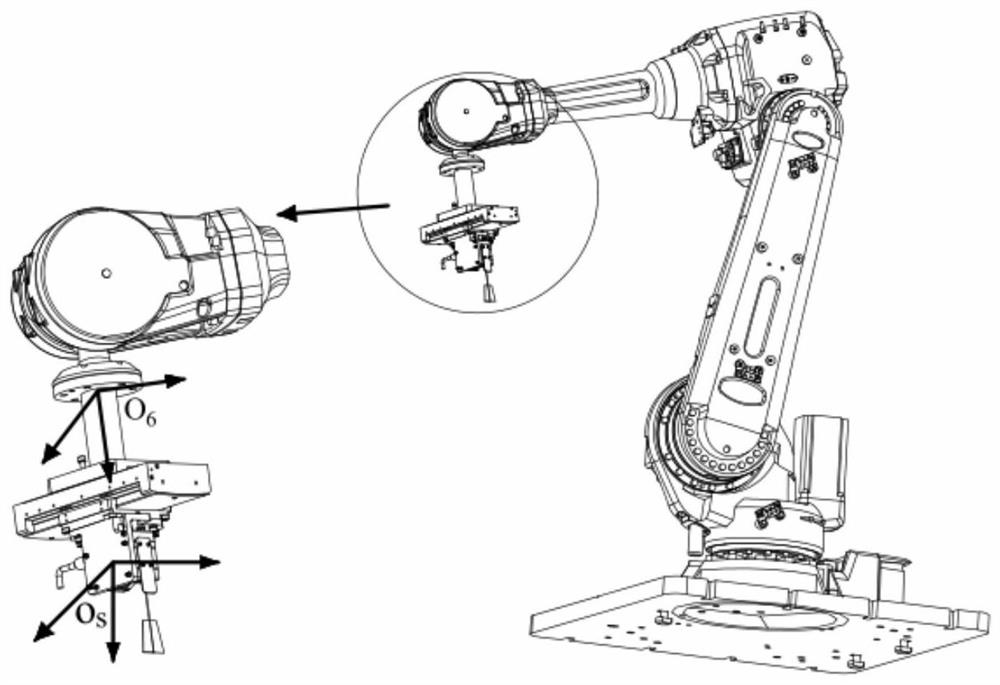
[0032] as Figure 1 and Figure 2 As shown, the present invention provides a robot hand eye calibration method, comprising steps:
[0033] S1, set up a laser tracker and tetrahedron, industrial robots set up a laser scanner to measure the tetrahedron;
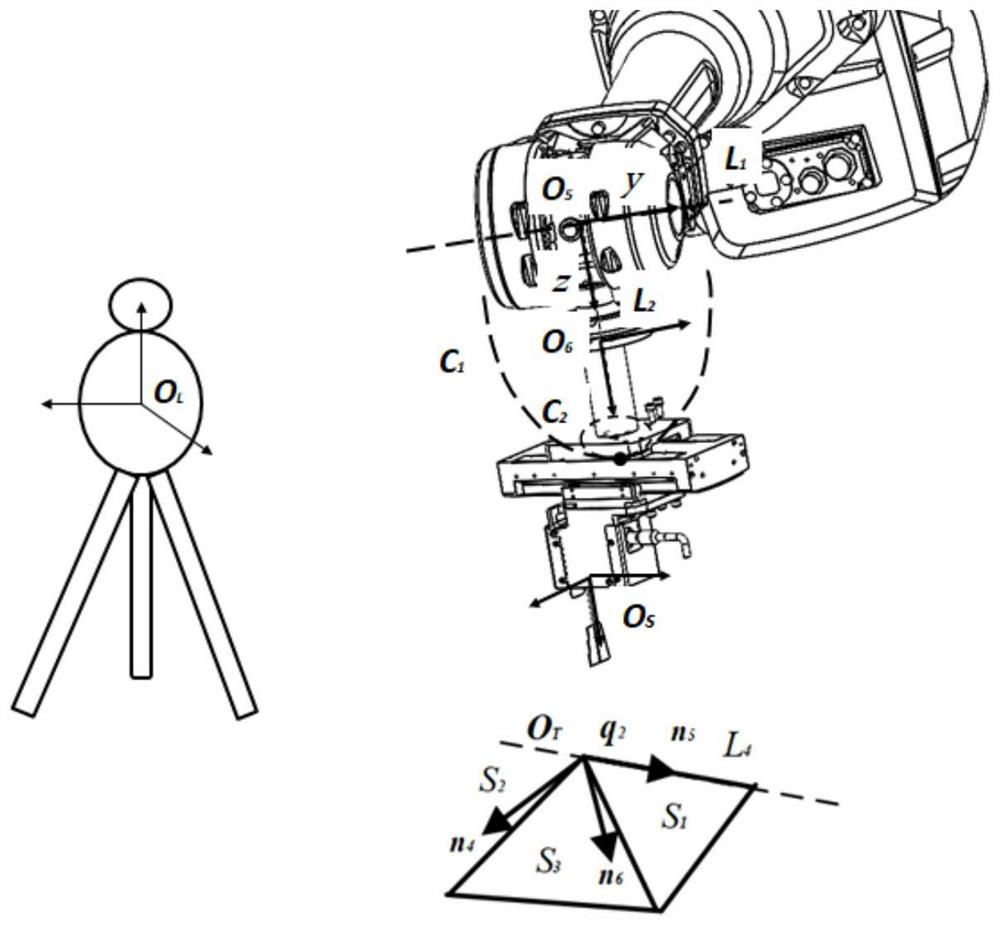
[0034]S2, calculate the transformation matrix It is the fifth joint axis coordinate system O 5 Conversion to and from laser tracker coordinate systems;
[0035] S3, calculate the transformation matrix is the conversion between the tetrahedral coordinate system and the laser scanner coordinate system;
[0036] S4, calculate the transformatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com