Automated control method applied to time table reliability of driverless bus
A technology of automatic control and unmanned driving, applied in traffic control systems, traffic control systems of road vehicles, traffic flow detection, etc., can solve problems such as real-time automatic control problems of unmanned buses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
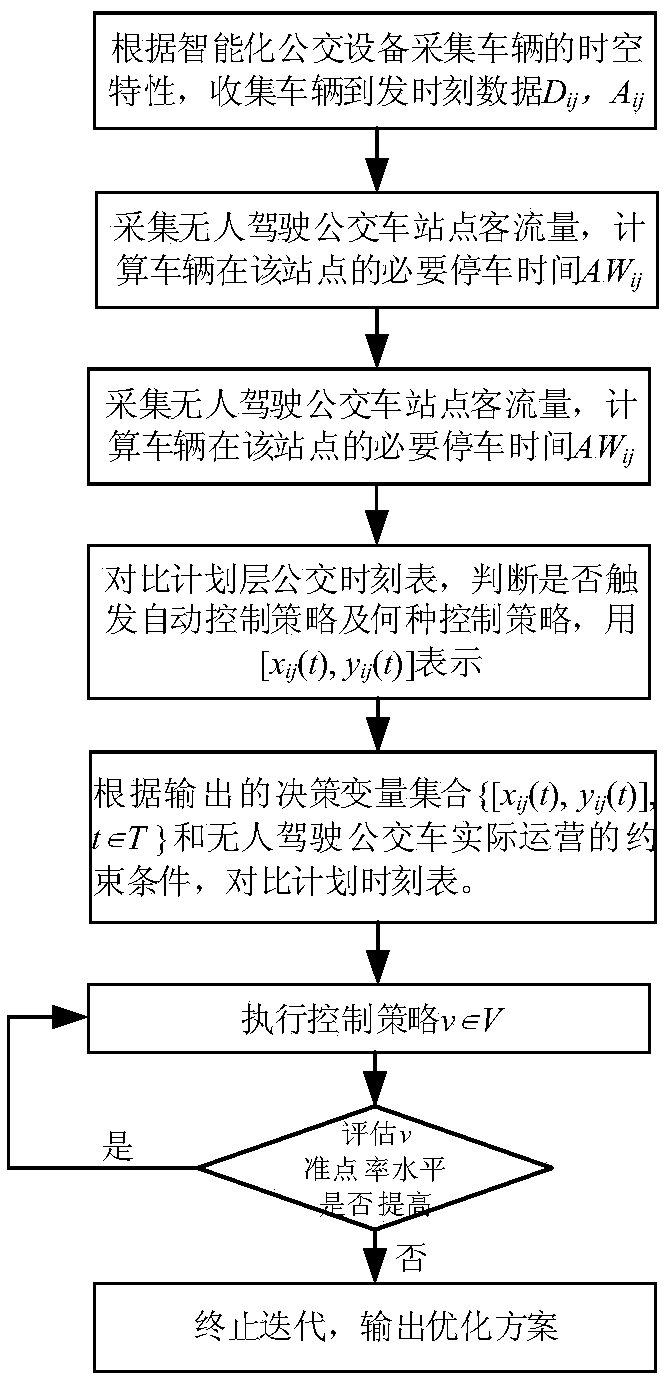
[0040] refer to Figure 1 to Figure 5 , in an embodiment of the present invention, an automatic control method applied to the reliability of the driverless bus timetable is provided. First, based on the GPS system, vehicle communication system and dynamic information transmission system of the driverless bus, the specifying the location information of the driverless bus, comparing the location information with the bus schedule corresponding to the preset driverless bus, and determining the actual driving state of the designated driverless bus, wherein the actual driving state includes On-time departure, early departure and late departure; then, collect the passenger flow of designated unmanned bus at each station on the set driving route, and calculate the passenger flow that can be boarded according to the accommodation space of the unmanned bus, and calculate the waiting time The boarding time of the passenger flow and the alighting time of the in-transit passenger flow, thr...
Embodiment 2
[0053] combine Image 6 with Figure 7 , and based on the description in the first embodiment, the automatic control method for the reliability of the timetable applied to the unmanned bus of the present invention is described again through a specific simulation experiment:
[0054] First, discretize the continuous time, for example, in the one-hour operation period from 8:00 to 9:00, divide it into 60 discrete time windows, let t=0 represent [8:00,8:01) , t=1 represents [8:01,8:02), t=2 represents [8:02,8:03), and so on; see Image 6 , it can be seen that when t=0, the unmanned bus is running normally, and x can be obtained at this time ij (t)=0, and y ij (t)=0, similarly the driving state of t=t+1, t∈T can be judged.
[0055] Subsequently, let t=t+1 until it is found that when t=5 and 6, the unmanned bus i is in the early departure, then optimize the model through the bus schedule, let x ij (t) = 1, t = 5, 6; when t = 7, the bus will start on time according to the set b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com