Control Method of Rocket Booster Launch Based on Robust Control Theory
A theoretical and robust technology, applied in the field of aircraft flight control, can solve the problems of the control system's weak anti-interference ability, the failure of the UAV to launch and take off, and the high sensor configuration requirements, so as to achieve a stable control effect and suppress the excessive angle of attack. The effect of large and lower production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051]Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
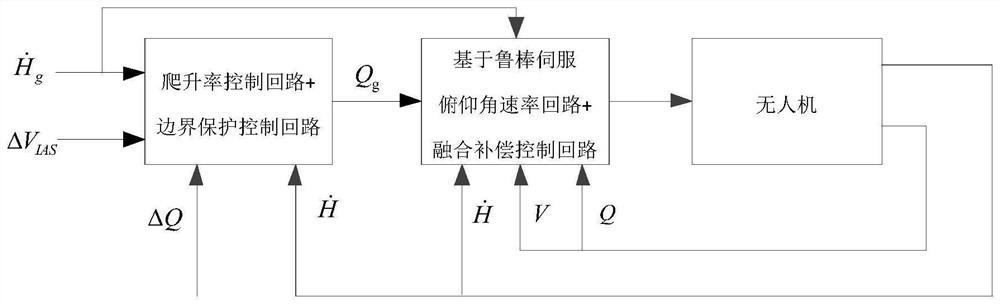
[0052] The control method of the rocket-boosted launch based on the angular rate plus fusion climb angle compensation based on the robust control theory, the specific design steps are as follows:
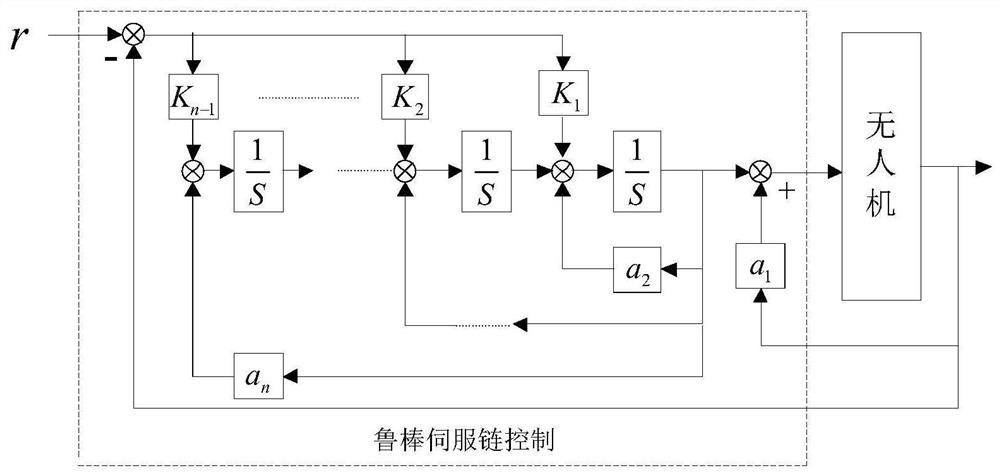
[0053] Step 1, design an inner loop controller based on robust servo control theory;
[0054] like figure 2 As shown, it is a robust servo chain structure. In the figure, a and K are the coefficients of the chain proportional term and the chain integral term respectively. Robust servo control is a typical optimal control method, which combines the advantages of robust analysis method and quadratic optimal control, and integrates the system's requirements for robust stability...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com