Automatic generation method for high-precision map based on high precision positioning and lane line recognition
A technology for lane line recognition and automatic generation, applied in directions such as road network navigators, can solve the problems of complex calculation process, time-consuming and labor-intensive, and time-consuming production process, so as to reduce complexity, avoid high error rate, and avoid labor consumption. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0055] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
[0056] It should be understood that terms such as "having", "comprising" and "including" used herein do not exclude the presence or addition of one or more other elements or combinations thereof.
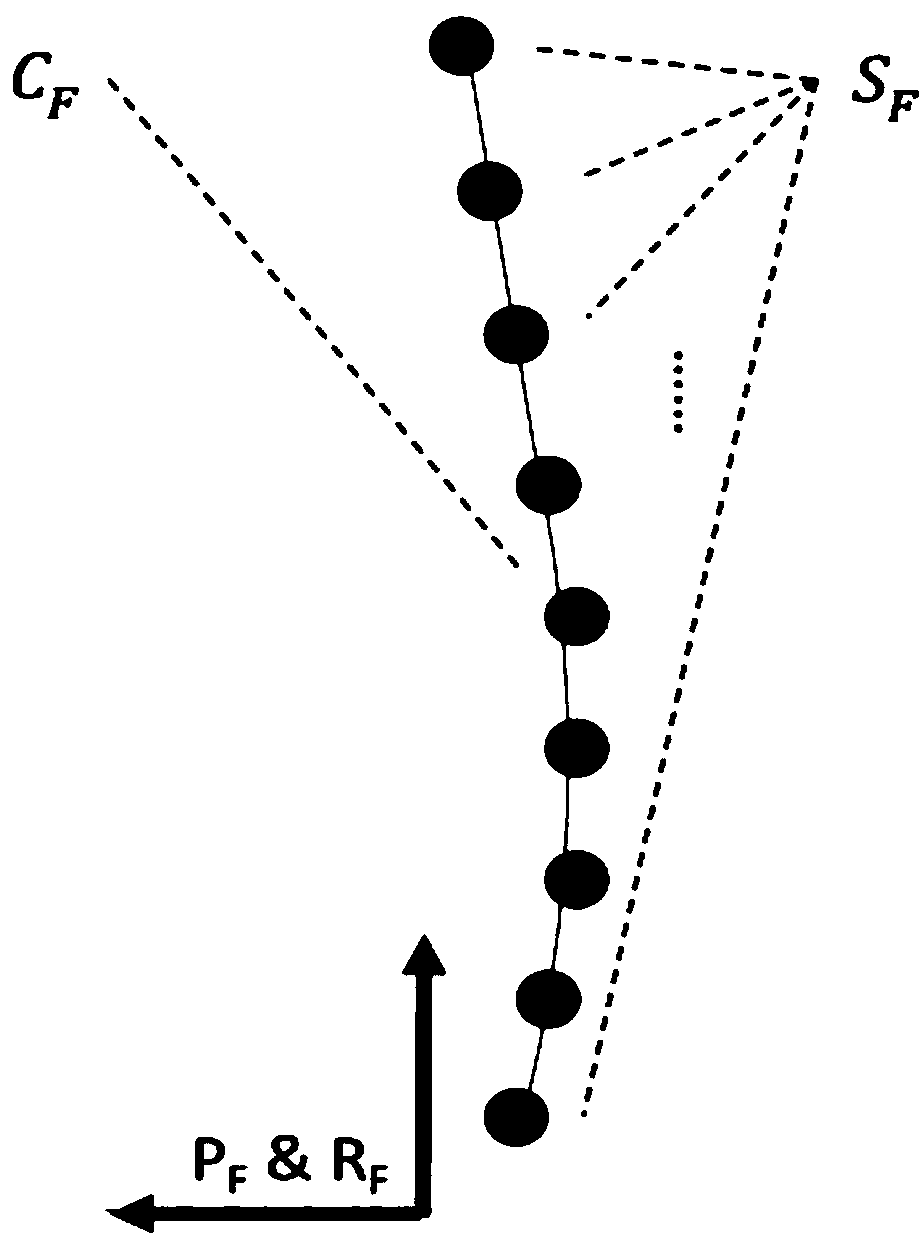
[0057] Such as figure 1 As shown, the present invention provides a method for automatically generating a high-precision map based on high-precision positioning and lane line recognition, including:
[0058] Step 1. Synchronize the high-precision positioning data acquired each time with the lane line data through time alignment processing, so as to obtain the position and attitude of the synchronized high-precision positioning data.
[0059] Step 2. Create a map frame from the synchronized lane line data and high-precision positioning data obtained in step 1, and store it in a map ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com