Intelligent waste classification robot based on binocular stereoscopic vision positioning and recognition
A binocular stereo vision, positioning recognition technology, applied in instruments, manipulators, image analysis and other directions, can solve problems such as affecting robot grasping and sorting, difficult to achieve accurate identification and positioning of targets, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The following specific embodiments of the invention will be further described in conjunction with the structural diagrams. The following specific embodiments are used to illustrate the present invention and do not limit the present invention in any way.
[0031] The intelligent garbage sorting robot based on binocular stereo vision positioning and recognition of the present invention will be further described below in conjunction with the accompanying drawings.
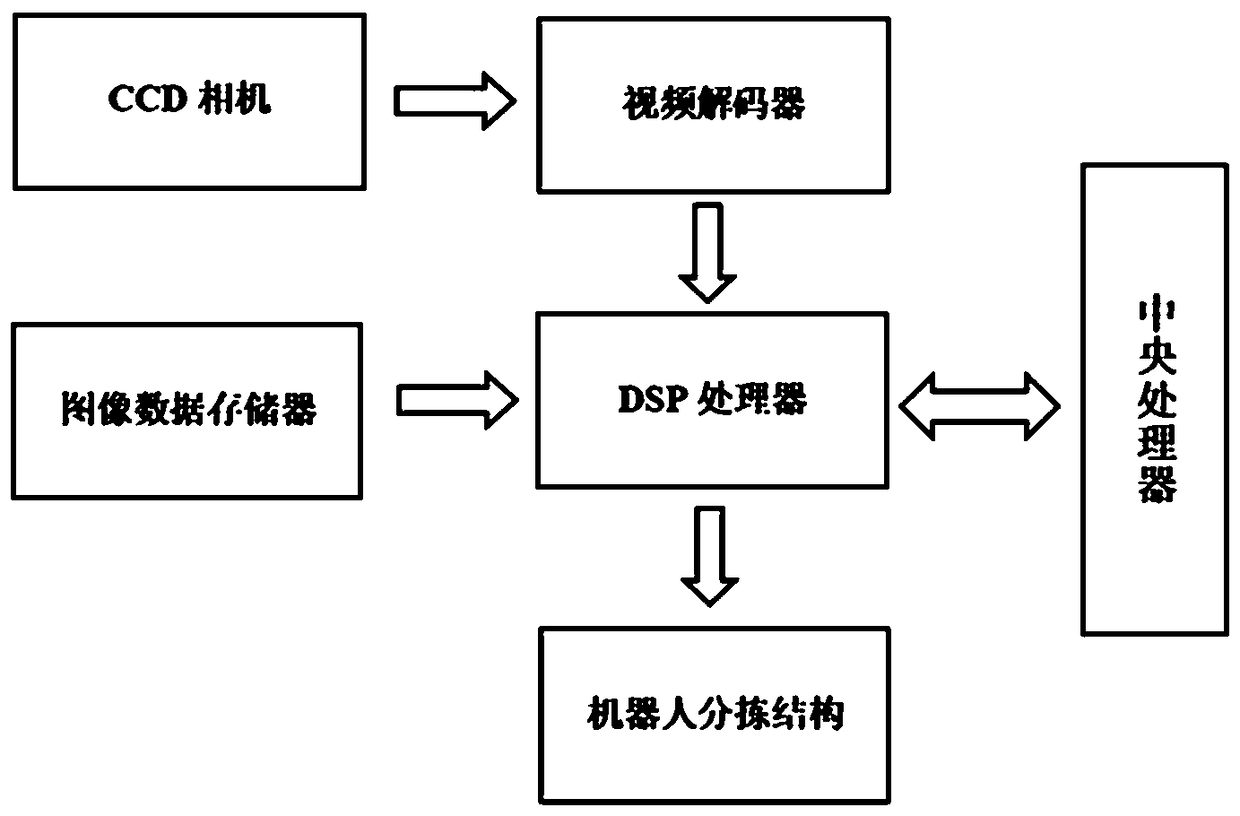
[0032] According to attached figure 1 , the garbage sorting robot based on binocular stereo vision positioning and recognition according to an embodiment of the present invention is mainly composed of a central processing unit, a DSP processor, two CCD cameras, a video decoder, an image data storage, a robot sorting structure and other components .
[0033] In the robot processing process, the target image is first collected by the CCD camera, the purpose is to obtain the basic image of the space scene, decode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com