Unmanned aerial vehicle automatic patrolling method for direct current single-circuit tension tower
A technology of unmanned aerial vehicle and tension tower, applied in non-electric variable control, instruments, overhead line/cable equipment, etc., can solve the problem of high pressure, low efficiency and poor consistency of manual inspection of DC single-circuit tension tower. problems, to avoid the problem of line collision and tower collision, improve consistency, and improve safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
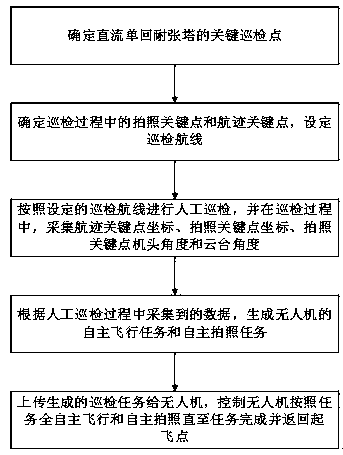
[0032] Such as figure 1 As shown, a UAV autonomous inspection method for a DC single-circuit strain tower includes the following steps:
[0033] S1. Determine the key inspection points of the DC single-circuit tension tower;
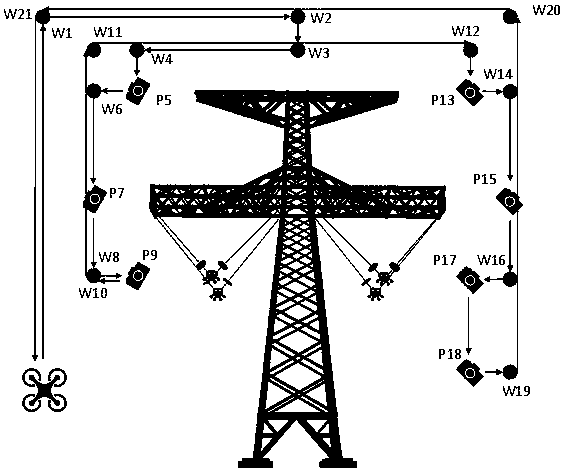
[0034] Such as figure 2 As shown, in the embodiment of this application, for the DC single-circuit strain tower, when facing the large side, except for the ground wires on both sides, the left side is the pole I line, and the right side is the pole II line. The planes don't hover inside the line when the drone is filming; instead, they hover on the sides of the tower. Therefore, in step S1, the key inspection points of the DC single-circuit strain tower include the hanging point of the left ground wire, the outer ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com