Deformation prediction and compensation method of three-dimensional stone carving robot processing system
A technology of robot processing and compensation method, which is applied to processing models, engraving, manipulators, etc., can solve problems such as low rigidity characteristics, deformation, and the dimensional accuracy of processed stones does not meet the requirements, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
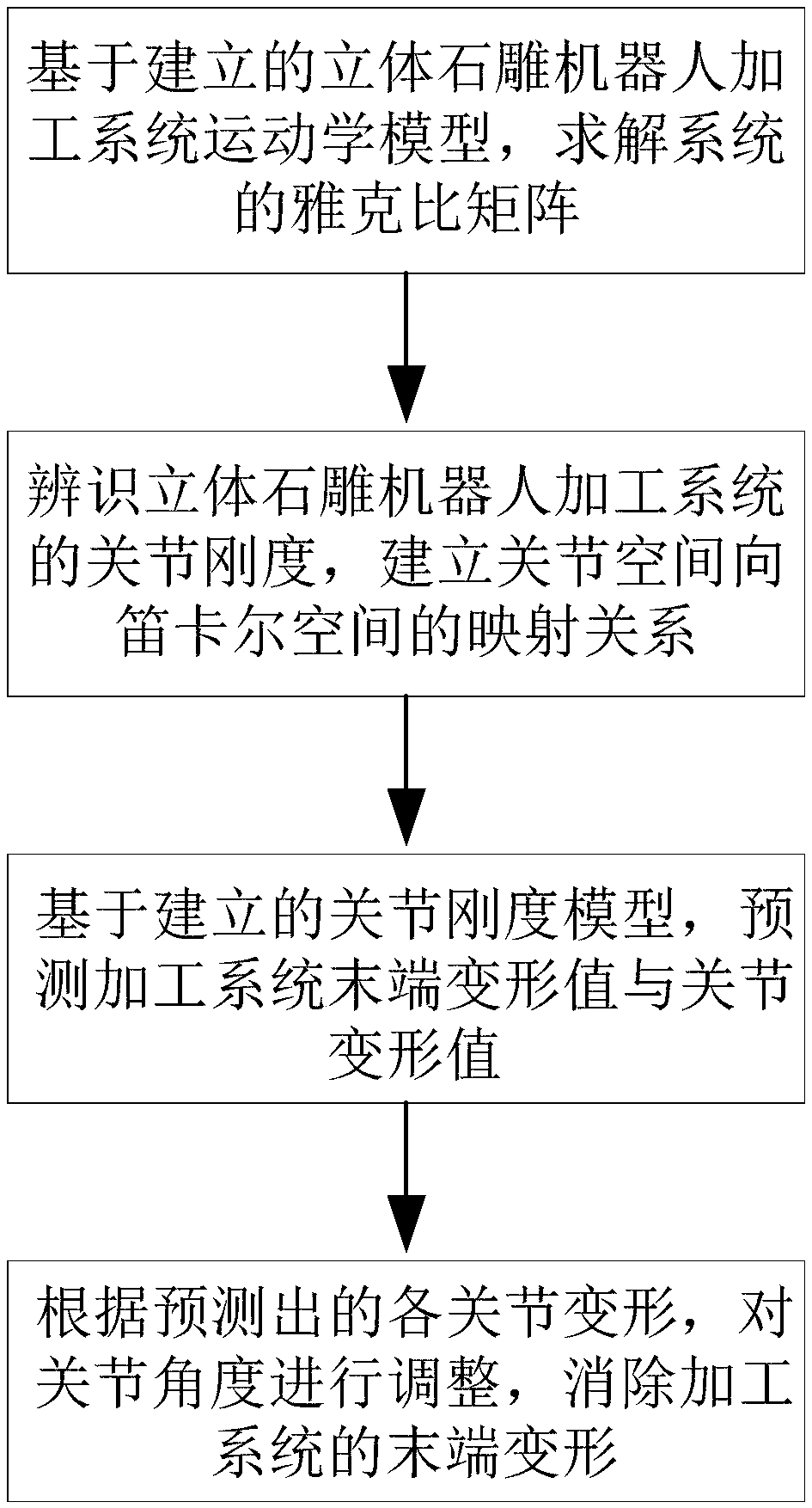
Method used
Image

Examples
Embodiment 1
[0072] Taking the QD KUKA2900 three-dimensional stone carving robot processing system as the research object, the kinematics model of the three-dimensional stone carving robot processing system is established, and its corresponding D-H parameters are shown in Table 1:
[0073] Table 1 D-H parameters corresponding to the initial configuration of the three-dimensional stone carving robot processing system
[0074] Table 1 DH parameters of three-dimensional stone carving robot processing system
[0075]
[0076] According to the established D-H parameters, the positive kinematic equation for solving the three-dimensional stone carving robot processing system is:
[0077]
[0078] In the formula,
[0079]
[0080] Based on the vector product method, given a set of joint angle values θ=[0 -45 0 0 90 0], the velocity Jacobian matrix and the force Jacobian matrix of the three-dimensional stone carving robot processing system are solved as follows:
[0081]
[0082...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com