Walking mechanism of multi-foot robot
A multi-legged robot and walking mechanism technology, applied in the field of mobile robots, can solve the problems of multi-legged robots such as driving, complex control, and difficult walking, and achieve the effects of enhancing obstacle-surpassing ability, reducing volume and weight, and reducing structure and driving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
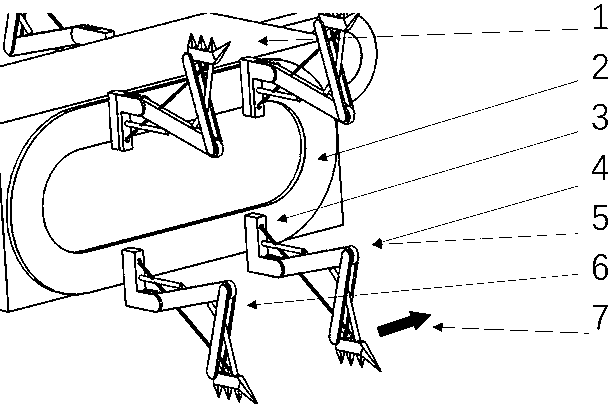
[0022] now attached figure 1 As an example to illustrate the implementation process of the present invention:
[0023] 1. Assume that a walking foot is suspended in the air before the robot starts;
[0024] 2. Robot along figure 1 Moving in the forward direction shown in middle 7, with the movement of the track, the suspended walking foot will gradually move from the upper part of the track to the figure 1 Move the position shown in 5;
[0025] 3. The suspended walking foot gradually approaches the surrounding figure 1 When the position shown in middle 5, the walking foot attitude control device of the robot controls the walking foot to open;
[0026] 4. Walking feet fully reach the figure 1 In the position shown in middle 5, the walking foot posture control device of the robot tightens the walking foot and grasps the ground, poles or other robot supports;
[0027] 5. The track continues to move, and the walking foot gradually moves from the attached figure 1 The positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com