Method for estimating measuring angle error in bearings-only passive positioning
A passive positioning and error estimation technology, used in positioning, radio wave measurement systems, measurement devices, etc., can solve the problems of low estimation accuracy and estimation methods relying on estimated values, etc., to improve estimation accuracy, improve estimation accuracy, and improve The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
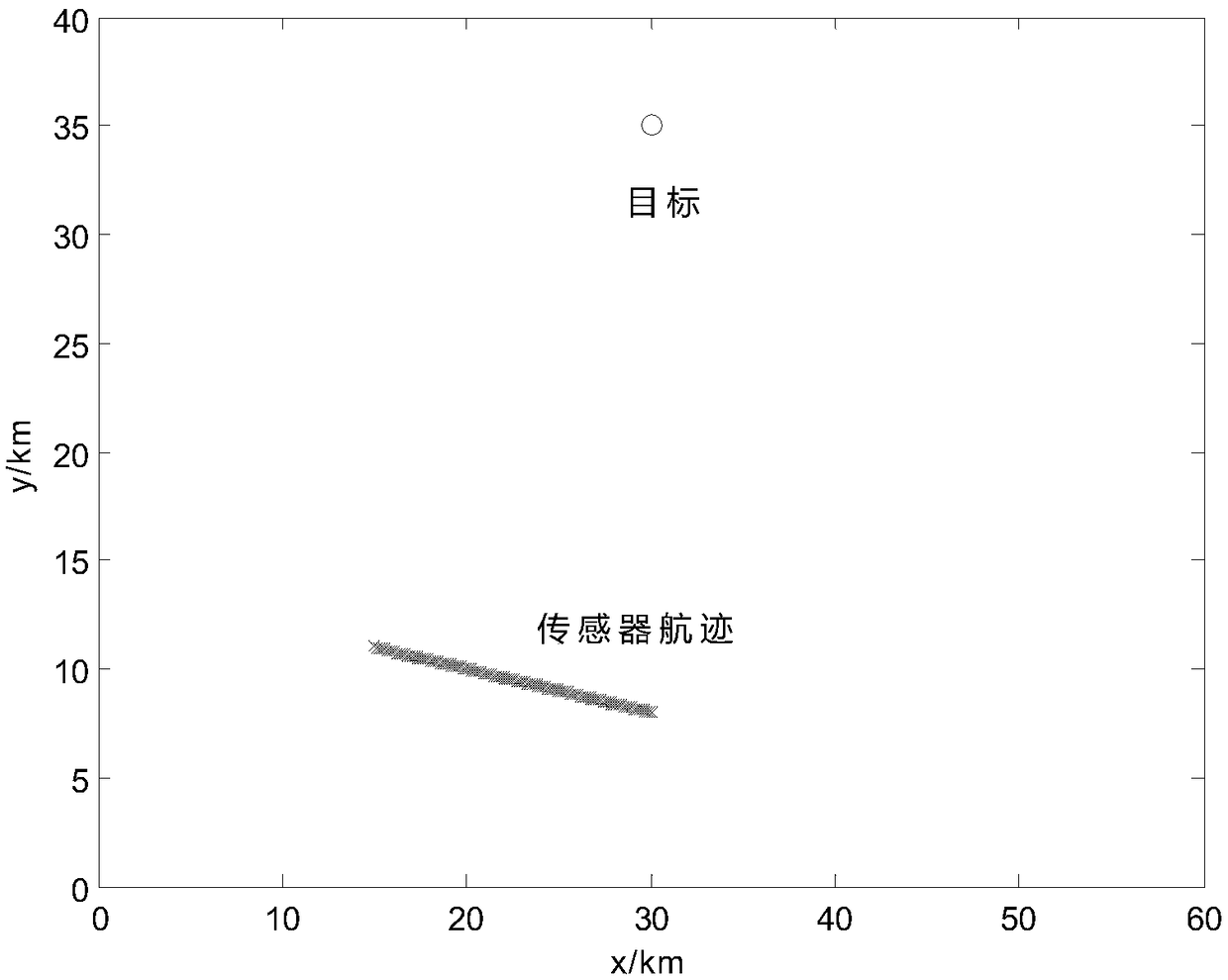
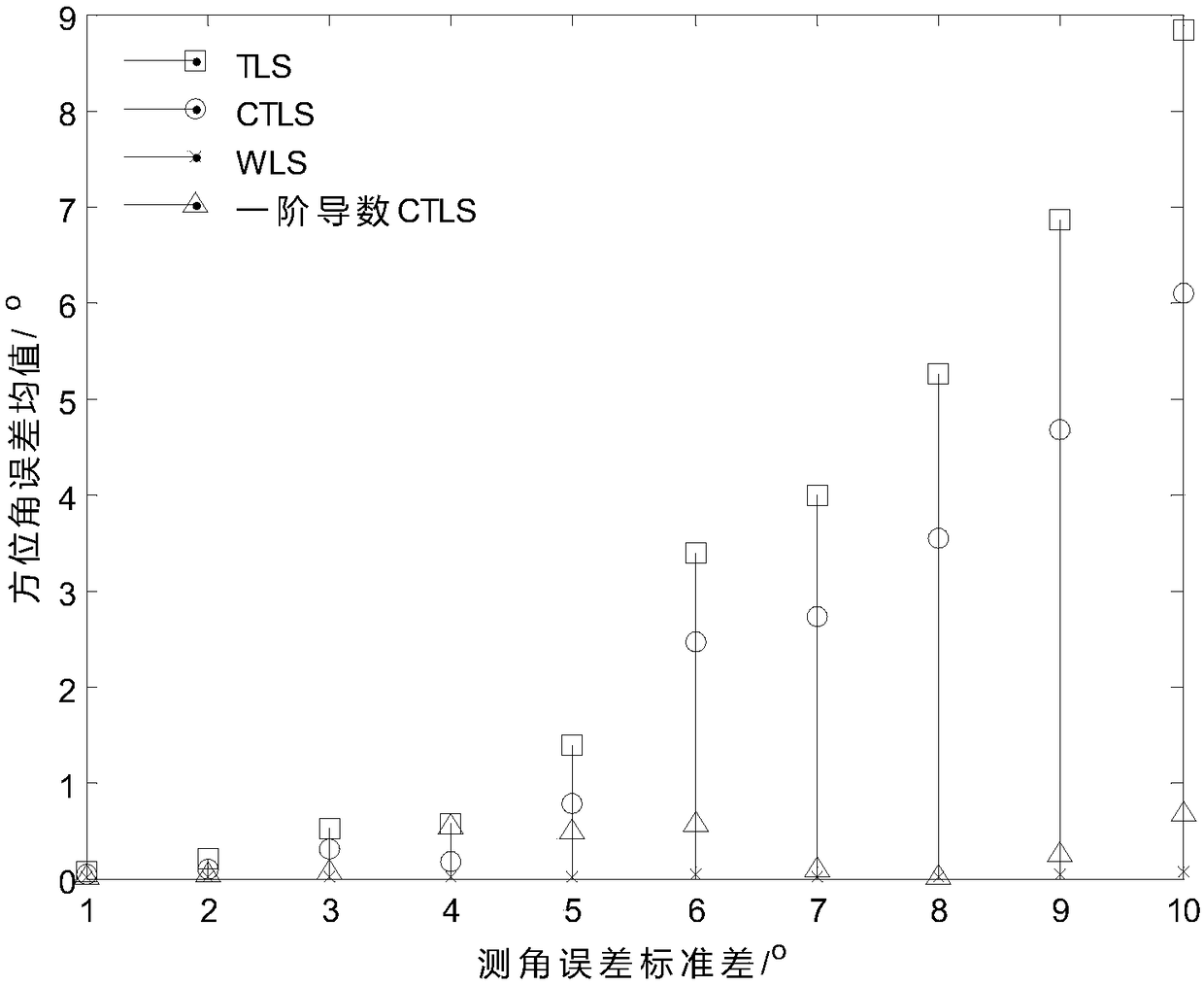
[0057] Embodiment 1: Implementation conditions: Consider a positioning scenario of a single motion sensor and a single fixed target. Suppose the target position is X=(30,35)′km; the sensor motion equation is y=-0.2x+14, and x∈[15,30]km, the sampling interval is 0.1km; the standard deviation of sensor angle measurement error σ∈ [1,10]°. In order to analyze the advantages and disadvantages of the algorithm performance, the angle measurement error estimation results of the present invention are compared with the estimation results of TLS (total least squares), projection CTLS (structural total least squares), and first-order derivative CTLS algorithms respectively. The so-called projection CTLS method is based on nonlinear programming and projection technology so that the positioning equation still has the structure of the original LS equation, and each row in the data vector is the inner product of the corresponding row vector in the coefficient matrix and the sensor position, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com