Multi-set TOF (Time Of Flight) depth information acquisition and synchronization method and system
A technology of depth information and synchronization system, which is applied in radio wave measurement system, electromagnetic wave re-radiation, utilization of re-radiation, etc., can solve the problem that there is no complete solution for depth information positioning in 360-degree space or larger space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
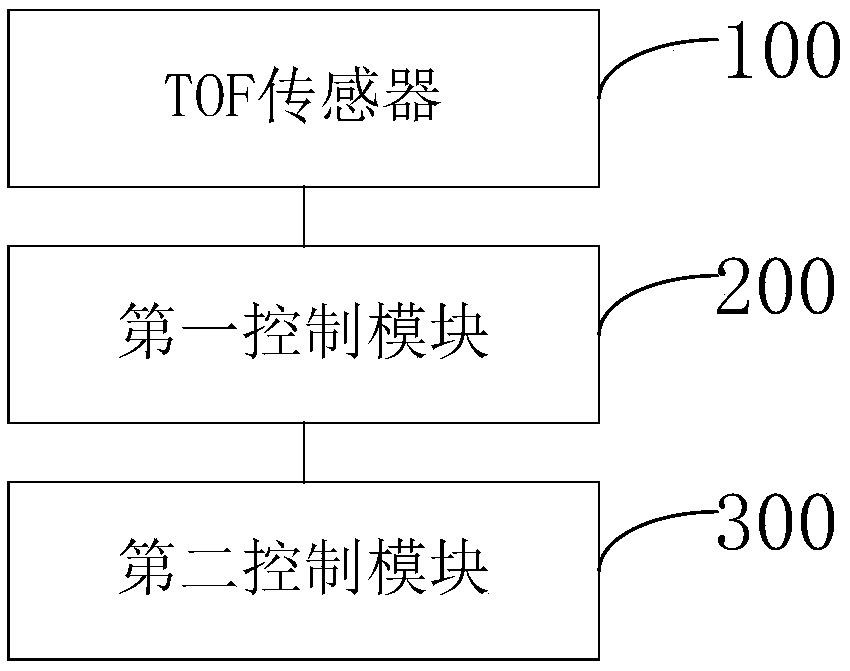
[0030] A multi-TOF depth information acquisition synchronization system, such as figure 1 , 5 As shown, it includes several TOF sensors 100, a first control module 200 and a second control module 300 with the same number of TOF sensors;
[0031] The TOF sensor 100 is used to obtain the spatial position information data of each target, and transmit the spatial position information data of each target to the first control module;
[0032] The first control module 200 is used to accelerate the processing of the spatial position information data of each TOF sensor to obtain control coordinate information, and transmit the control coordinate information to the second control module;
[0033] The second control module 300 is configured to output a homologous shutter signal according to each control coordinate information, and feed back the homologous shutter signal to each of the first control modules, and each first control module according to the same The source shutter signal then gener...
Embodiment 2
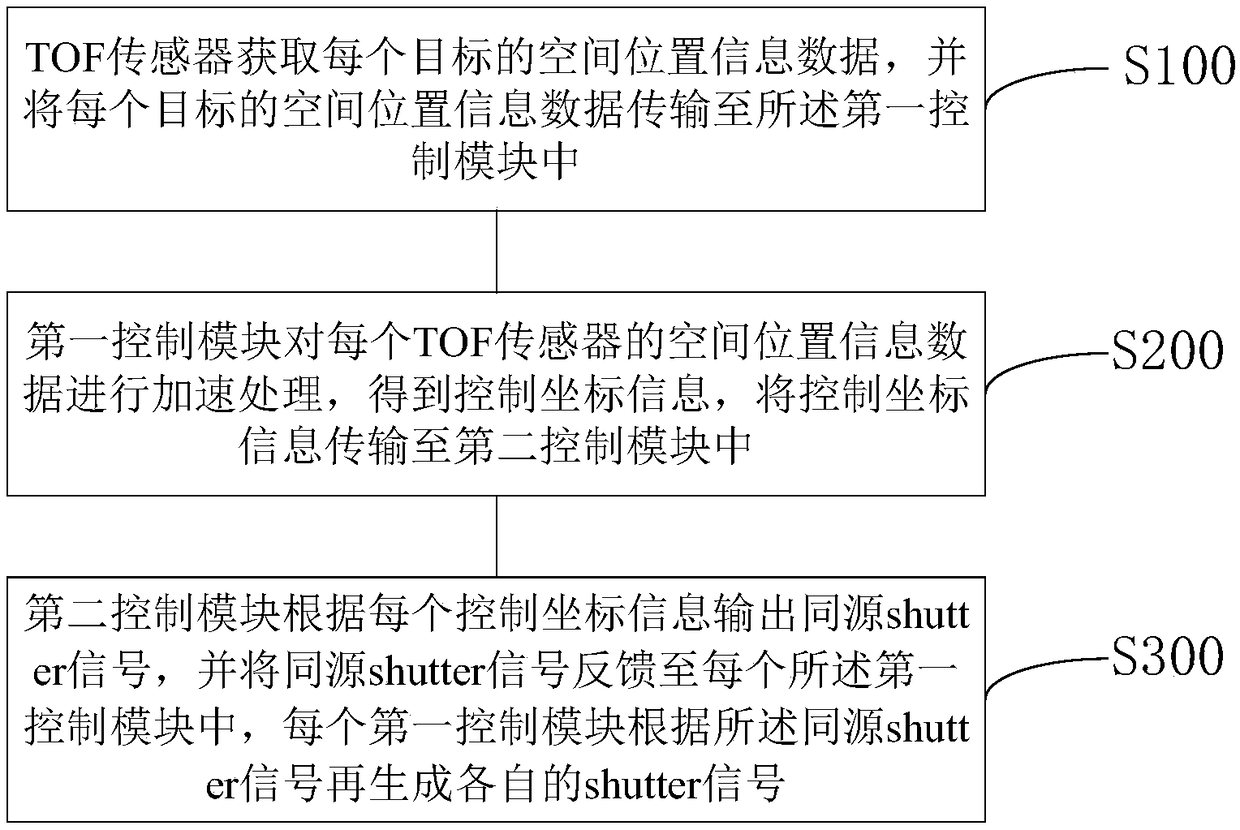
[0038] A method for multiple TOF depth information acquisition synchronization, such as figure 2 As shown, including the following steps:
[0039] The TOF sensor acquires the spatial position information data of each target, and transmits the spatial position information data of each target to the first control module;
[0040] The first control module accelerates processing of the spatial position information data of each TOF sensor, obtains control coordinate information, and transmits the control coordinate information to the second control module;
[0041] The second control module outputs a homologous shutter signal according to each control coordinate information, and feeds back the homologous shutter signal to each of the first control modules, and each first control module generates its own shutter signal according to the homologous shutter signal. Shutter signal.
[0042] As an implementable manner, the second control module outputs a homologous shutter signal according to e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com