Multi-fin Torsional Wave Underwater robot
An underwater robot and long-fin technology, applied in the field of robotics, can solve the problems of inability to travel at long distances, high speed, small range of underwater robots, and harm to surrounding aquatic organisms, etc. installation, low noise effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
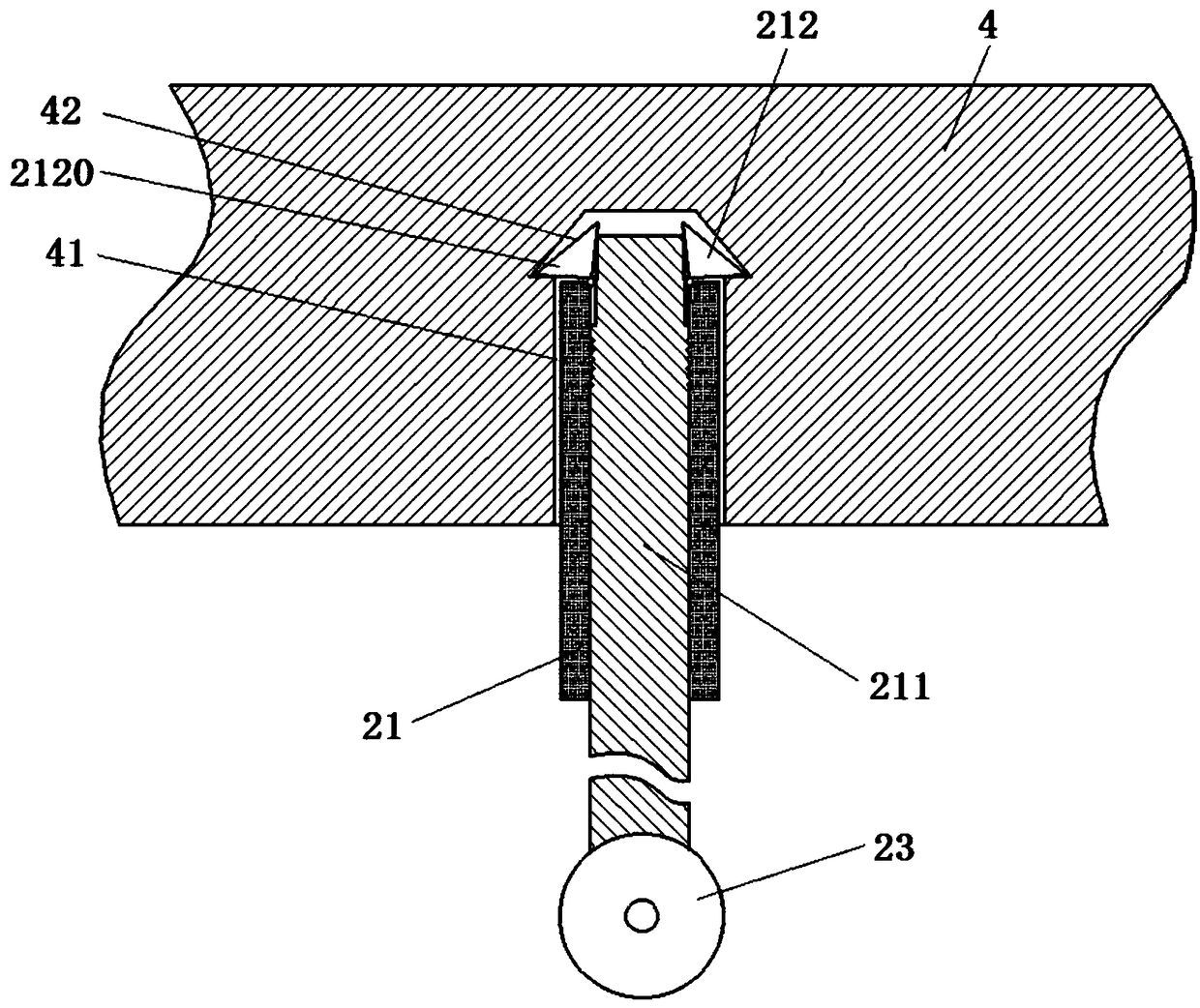
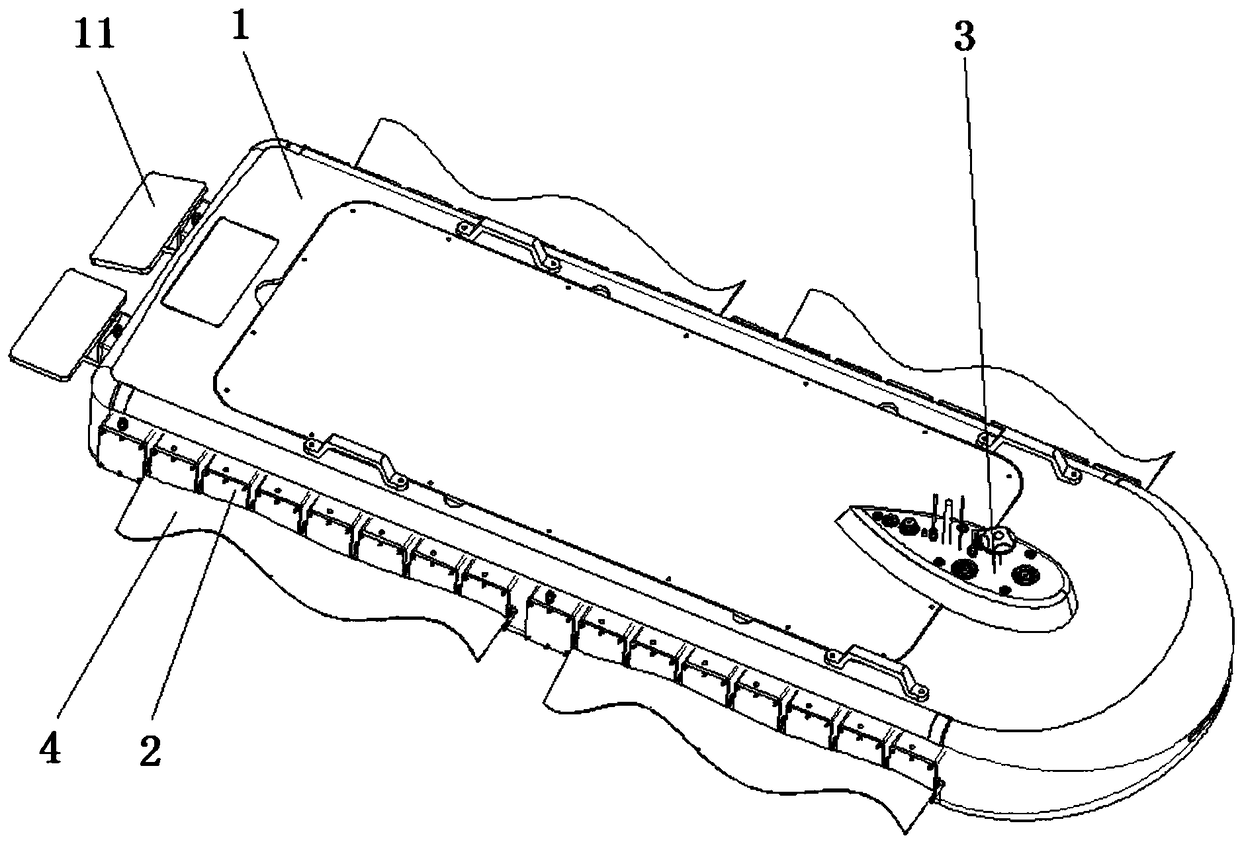
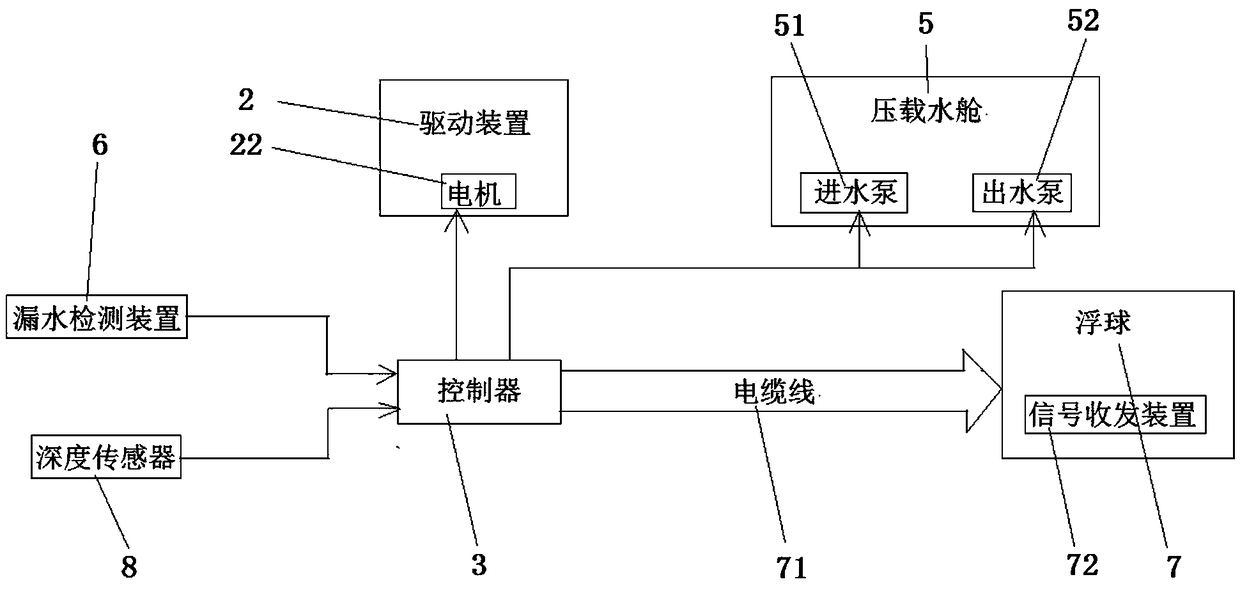
[0026] The multi-fin twisted wave underwater robot, as shown in the figure, includes a hull 1, a driving device 2 installed on the hull 1, and a controller 3 connected to the driving device 2. A driving rod 21 is installed on the driving device 2 to control The device 3 controls the driving device 2 to drive the driving rod 21 to rotate, and also includes elastic long fins 4 located on both sides of the hull 1. A plurality of driving rods 21 are fixed on one long fin 4 and the long fins 4 are driven by the driving rod 21 To achieve the toggle of the water. Through wave propulsion, the underwater robot can realize forward and backward movement, left and right steering, in-situ rotation, and pitch motion; through the flapping motion, the underwater robot can realize left and right steering, in-situ rotation, pitch motion, and lateral movement; The watertight box of the machine is sealed and protected. It adopts modular design and external installation for easy inspection and main...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com