Design method and system for four-rotor robot software platform
A technology of robot software and design method, applied in the direction of control/adjustment system, instrument, non-electric variable control, etc., can solve the problems of redevelopment, waste of time, waste of resources, etc., to improve development efficiency and benefit from secondary development , to avoid the effect of redeveloping the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The invention provides a software platform design method for a four-rotor robot. With the software platform constructed using the software platform design method, users can easily carry out secondary development after mastering the platform architecture and interface.
[0051] The design method of the four-rotor robot software platform of the present invention specifically includes:
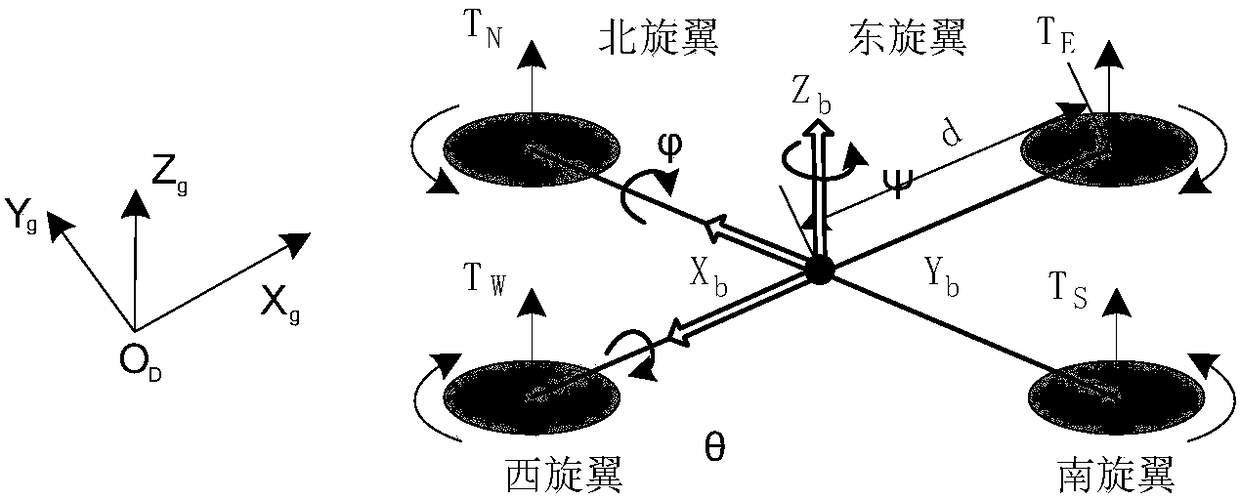
[0052]Carry out the coordinate system conversion of the body plan, body coordinate system, and ground coordinate system in order to describe the motion state of the aircraft. see figure 1 , is a schematic diagram of the coordinate system conversion of the software platform of the quadrotor robot of the present invention, showing the body plan, body coordinate system, and ground coordinate system of the quadrotor robot.
[0053] The parameters such as attitude angle, flight speed, and direction of the quadrotor robot are always related to the coordinate system. To accurately describe the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com