Joint type internal skeleton pneumatic soft hand claw
A technology of soft grippers and endoskeletons, which is applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of insufficient, heavy objects cannot be effectively grasped, and low output force, so as to improve the grasping ability and clamping diversity The effect of improving ability and increasing degree of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to illustrate the technical scheme and technical purpose of the present invention, the present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments.
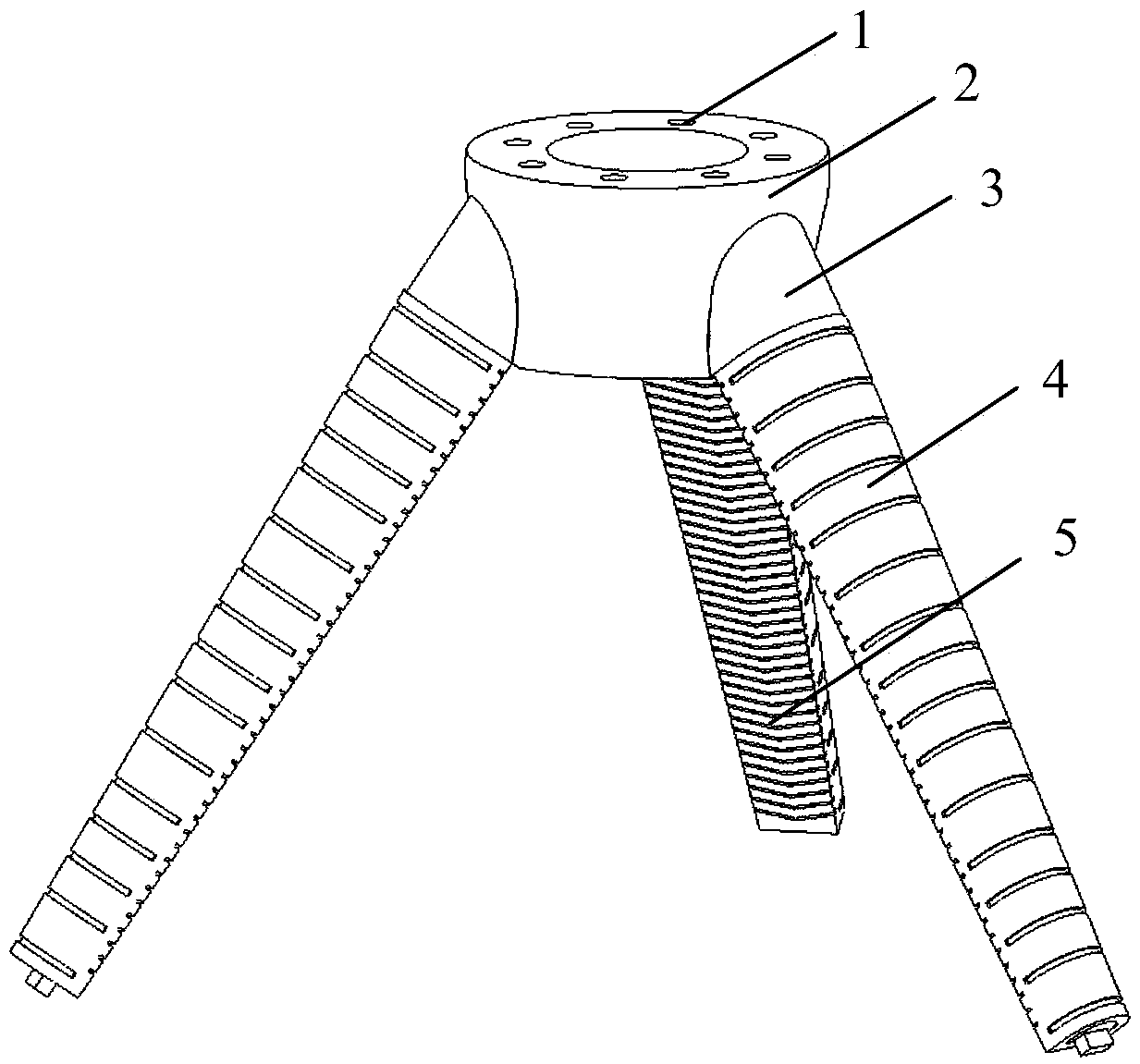
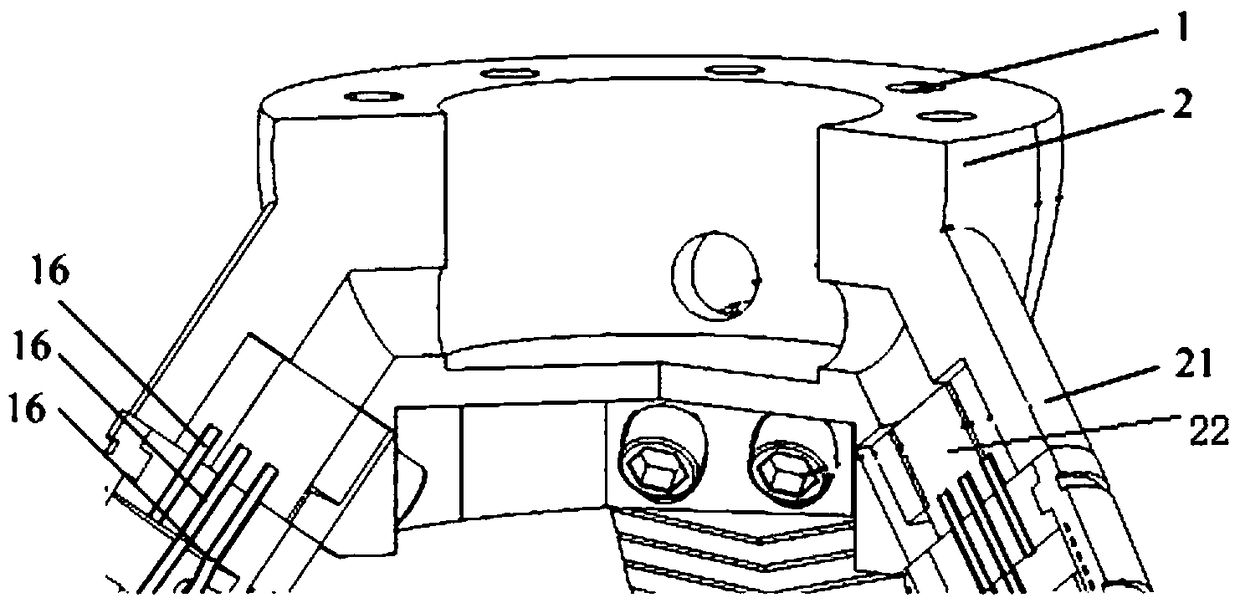
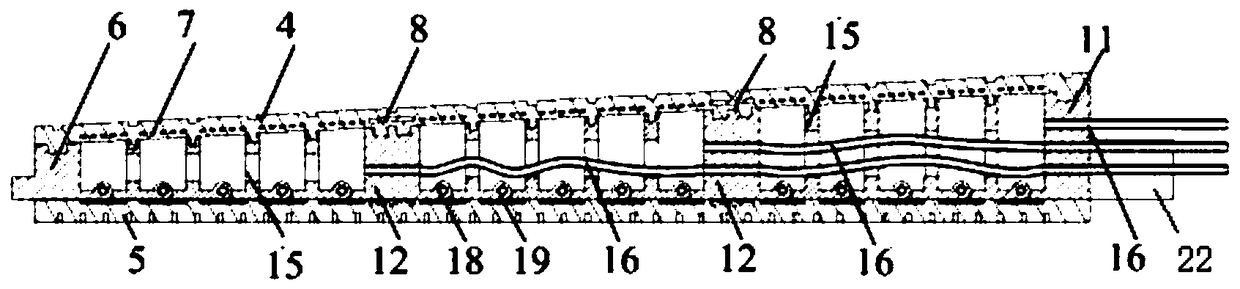
[0025] combine Figure 1-Figure 4 , a articulated endoskeleton pneumatic soft gripper of the present invention, comprising a central palm 2, N (N≥3) soft tentacles 3 evenly fixed on the central palm 2 for one week; the soft tentacles 3 include M (M is greater than or equal to 3) successively connected joints; the joints include an elastic stretch layer 4, a plurality of support skeleton parts 15 evenly distributed in the elastic stretch layer; the support skeleton parts 15 are used to support the elastic stretch layer 4, the inner cavity of the elastic stretch layer 4 is divided into a plurality of air chambers; the supporting skeleton part 15 is connected with the elastic stretchable layer 4, and the supporting skeleton parts 15 are sequentially hinged...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com