Wearable type electric driving assisting exoskeleton lower limb mechanism
A wearable and exoskeleton technology, which is applied in the direction of walking aids, passive exercise equipment, physical therapy, etc., can solve immaturity and other problems, and achieve the effect of enhancing walking ability, reliable assisting effect, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
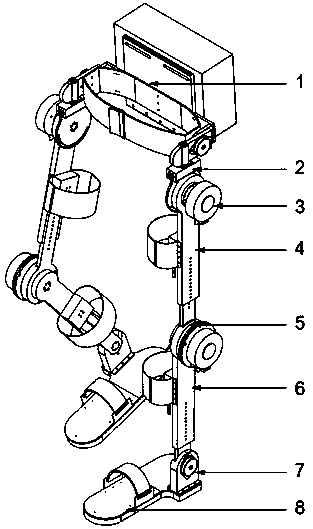
[0028] Such as figure 1 As shown, the present invention includes: a waist 1, a left leg, a right leg, a motor-reducer drive system 3, and a battery power supply 9; wherein, the left leg and the right leg are respectively hinged with the waist 1 and arranged symmetrically on both sides of the waist ; The motor-reducer drive system 3 is set respectively at the active drive joints (hip joint 2 and knee joint 5 ) of the left and right legs and controls them; the battery power supply 9 supplies power to the motor-reducer drive system 3 .
[0029] Such as figure 2 – Figure 8 As shown, the waist includes: a battery, a back load board 10, a battery bottom plate, a waist width adjustment plate 11, a sponge pad 12, a connecting plate 13, a waist rotation damper 14, a waist strap 15, and a waist rotation plate 16. Wherein, the battery bottom plate is installed on the rear and lower part of the back load-bearing plate 10; two waist width adjustment plates 11 are respectively connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com