Nonlinear regression tuning method of synchronous machine model parameters based on penalty factor
A non-linear regression and synchronous motor technology, applied in electrical digital data processing, design optimization/simulation, special data processing applications, etc., can solve problems such as inability to obtain the best results and inaccurate calculation results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment approach
[0041] 1. The motor model parameter nonlinear regression tuning method, the motor model parameter nonlinear regression tuning method; includes the following steps: establishing a mathematical model, extracting key data points of peak and valley points, nonlinear regression problem, large residual error The nonlinear parametric regression solution of ;
[0042] Establish a mathematical model; establish a mathematical relationship between parameters and output, that is, a model, for the nonlinear system to be analyzed; unify the upper and lower peak and valley points of the motor test curve into a mathematical expression;
[0043] Synchronous Motor Sudden Short Circuit Model in:
[0044] upper envelope point
[0045] lower envelope point
[0046] If the upper and lower envelope points appear alternately, the upper and lower points are unified as
[0047]
[0048] , where if the starting point is the upper envelope, then k=0; otherwise k=1, j is the jth envelope point...
example
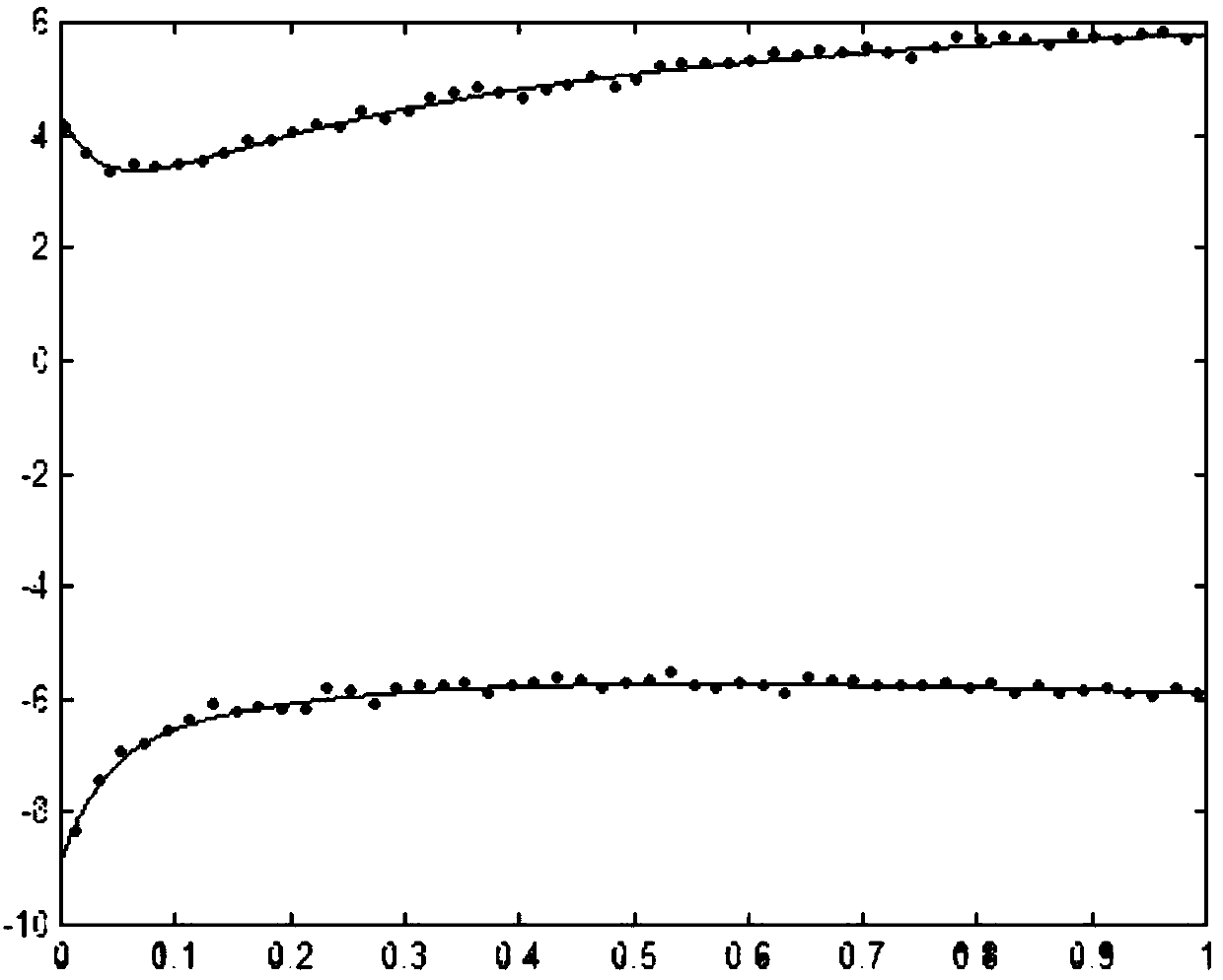
[0067] Example: Synchronous motor sudden short circuit model, here t=0.01*i+0.00386, 2πft+0.358 radians=180*i+90 degrees, 6.546 is the steady state current, here sin(2πf(0.01*i+0.00386)+0.358)= (-1) i , represents the peak-to-valley point of the short-circuit current of the synchronous motor; here p(5)=p'(5)sin(0.358), 0.358 is the initial angle at the closing moment, f=50Hz, 2f=100, therefore, 0.386*π+0.358 = π / 2 radians, that is, 90 degrees;
[0068] , plus noise Number of calculation cycles = 30.
[0069] Table 1 Comparison of LM algorithm and improved algorithm results
[0070]
[0071] Note: The data is generated by synchronous motor model value plus noise 0.1randn(), Ptrue represents the real parameter value of the model, Pinitial represents the initial value calculated by the algorithm, Pfit(LM) represents the calculated value fitted by the LM algorithm, Pfit(μ=0.103,α) Indicates the value of the improved algorithm fitting result; the value of λ is determined ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com