


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Automatic vehicle following method and system for simulating driver characteristics on the basis of LSTM
An automatic car-following and self-car technology, which is applied to vehicle components, biological neural network models, external condition input parameters, etc. Data timing characteristics and other issues to achieve self-learning, smooth car-following control process, and self-adaptation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
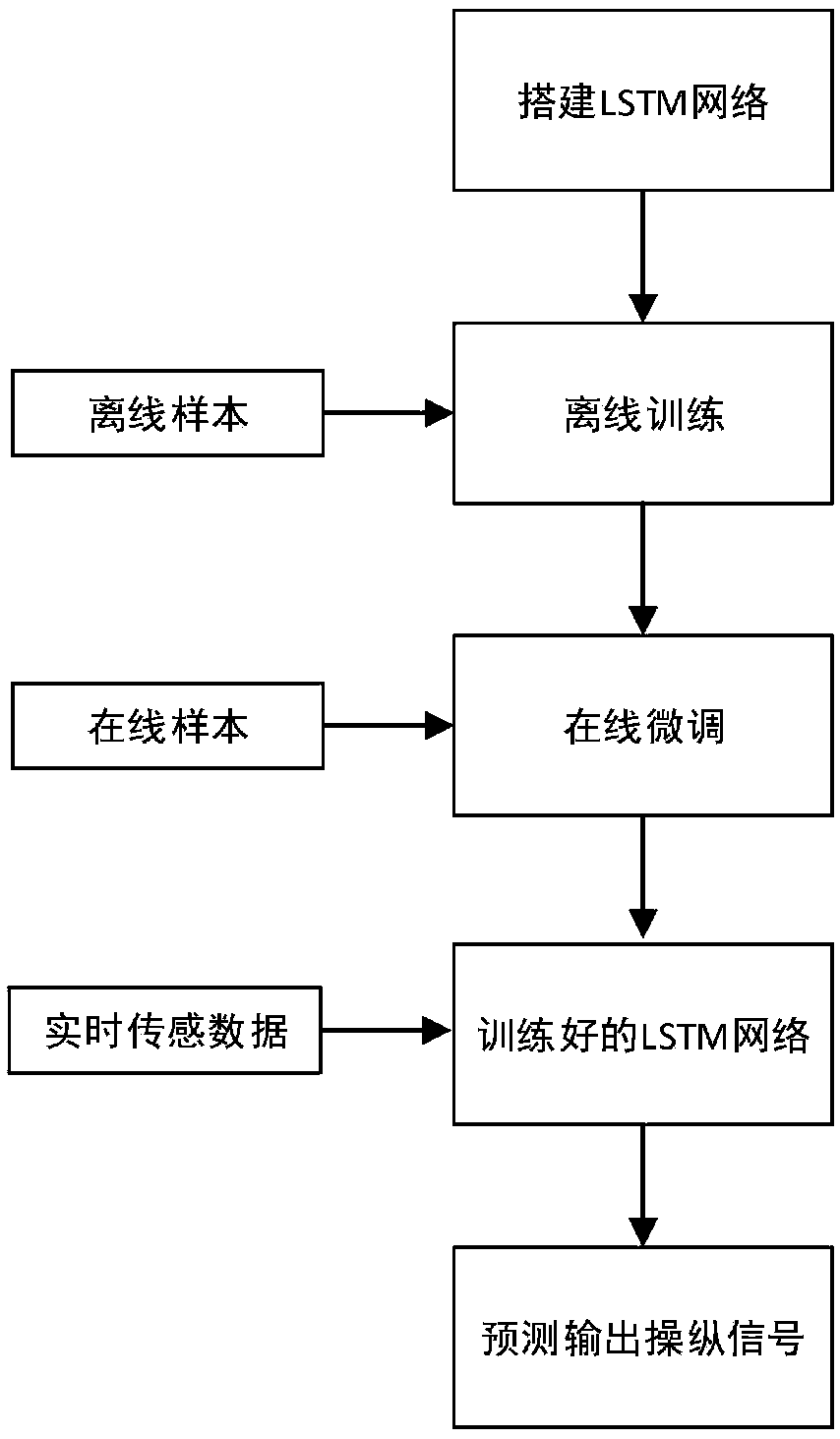
[0039] Such as figure 1 As shown, the present embodiment provides an LSTM-based automatic car following method for simulating driver characteristics, which is used to control the speed of the target vehicle itself so as to maintain the distance between the target vehicle and the vehicle in front or keep the vehicle speed; including the following steps:
[0040]Step S101, establish a training sample library according to the driving training data collected in different places and weathers; the driving training data includes input feature data and corresponding driving manipulation data; the input feature data includes the speed of the vehicle in front, the speed of the vehicle in front, the Vehicle acceleration, inter-vehicle distance, the driving manipulation data includes accelerator pedal and brake pedal sensor data. In practical applications, experimental vehicles can be used to collect driving training data in real urban road environments. The above-mentioned empirical dat...
Embodiment 2
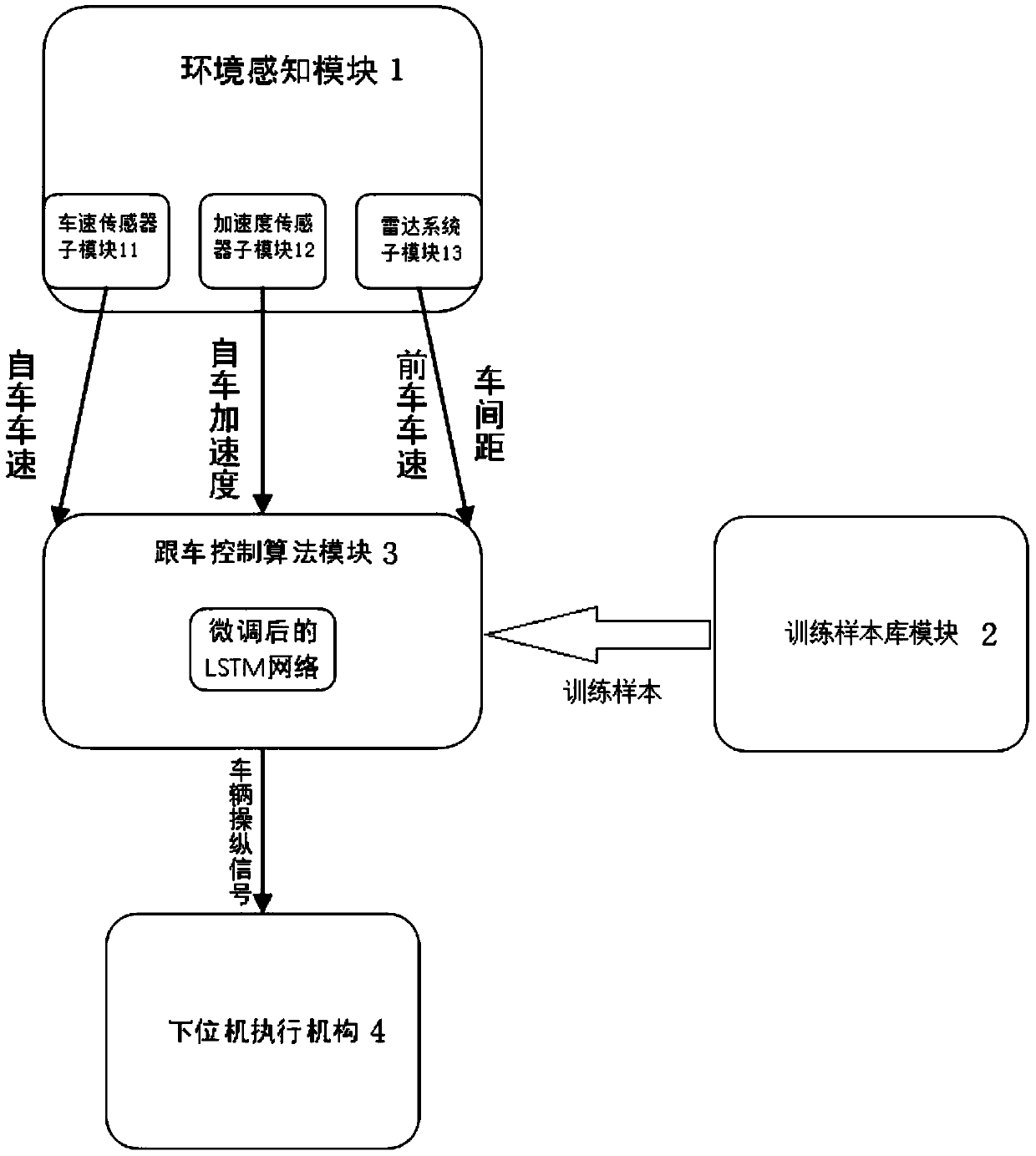
[0091] Such as image 3 As shown, an LSTM-based automatic car-following system for simulating driver characteristics includes an environment perception module 1, a training sample library module 2, an automatic car-following control algorithm module 3, and a lower computer execution module 4; wherein:
[0092] The environment perception module 1 includes: a vehicle speed sensor submodule 11, an acceleration sensor submodule 12 and a radar system submodule 13; The self-vehicle speed v1 of the target vehicle, the acceleration sensor submodule 12 (specifically, Xsens MTI-G-710 inertial element can be selected) is used to obtain the self-vehicle acceleration a of the target vehicle in real time, and the radar system submodule 13 (specifically can be IBEO LUX4L laser radar) is used to obtain the speed v2 of the vehicle in front and the distance s between the target vehicle and the vehicle in front in real time.
[0093] The training sample library module 2 is used to set up a trai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com