Path planning method, control method, system, medium, control station and unmanned aerial vehicle
A path planning and unmanned aerial vehicle technology, applied in control/regulation system, vehicle position/route/height control, attitude control, etc., can solve the problem of unevenness between flight movements, so as to ensure accuracy and improve control efficiency , the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
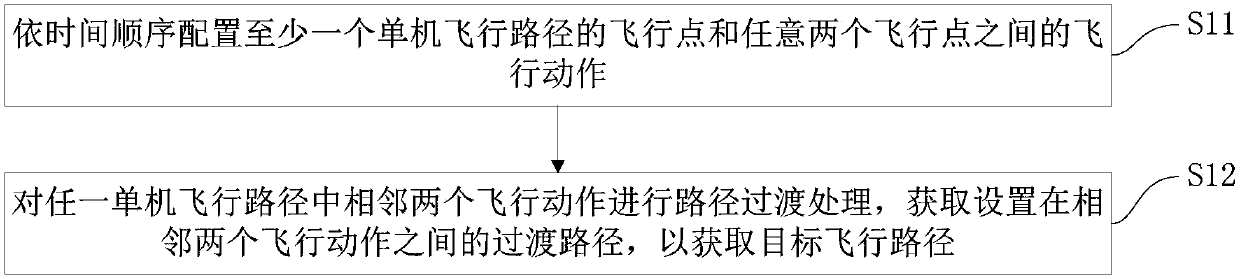
[0056] figure 1 It shows that a UAV path planning method is provided in this embodiment. The UAV path planning algorithm is executed by the ground control station in the UAV flight control system. The UAV flight control system includes a ground control station and at least one UAV, and the ground control station and each UAV can be connected through Wi-Fi network, 3G network, 4G network or 5G network communication to ensure Signal transmission between the ground control station and the drone. Such as figure 1 As shown, the UAV path planning method includes the following steps:
[0057] S11: Configure at least one flight point of the flight path of a single aircraft and flight actions between any two flight points in time sequence.
[0058] Among them, the flight point is a point that must pass through during the flight control of the UAV. A flight action is an action set between any two flight points, and the flight trajectory of the drone can be determined by the flight ...
Embodiment 2
[0111] This embodiment provides a non-volatile computer-readable storage medium on which a computer program is stored. When the computer program is executed by a processor, the UAV path planning method in Embodiment 1 is implemented. In order to avoid repetition, the This will not be repeated here. If the non-volatile computer-readable storage medium stores a computer program that can implement the UAV path planning method in Embodiment 1, when the computer program is executed by a processor, the unmanned vehicle in Embodiment 1 can be realized. In order to obtain the target flight path, the target flight path controls the flight time more accurately and the flight path is smoother, so that when the drone is controlled based on the target flight path, the flight process of the drone is smoother , which is conducive to ensuring the safety of the UAV flight process.
Embodiment 3
[0113] This embodiment provides a ground control station. The ground control station includes a memory and a processor, and a computer program is stored on the memory. When the computer program is executed by the processor, the UAV path planning method in Embodiment 1 is implemented. To avoid repetition, no further details are given here. When the processor of the ground control station executes the computer program stored in its memory, the UAV path planning method in Embodiment 1 can be realized, so that the target flight path planned by it can control the flight time more accurately, and the flight path Smoother, so that when the flight of the drone is controlled based on the target flight path, the flight process of the drone is smoother, which is conducive to ensuring the safety of the flight process of the drone.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com