Repetitive Motion Planning Method for Redundant Robot Using Finite Interval Neural Network
A neural network and repetitive motion technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of unguaranteed motion repeatability, accidents and dangers, and low efficiency, and achieve fast convergence characteristics and high accuracy of closing angles , low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention will be further described below in conjunction with the accompanying drawings.
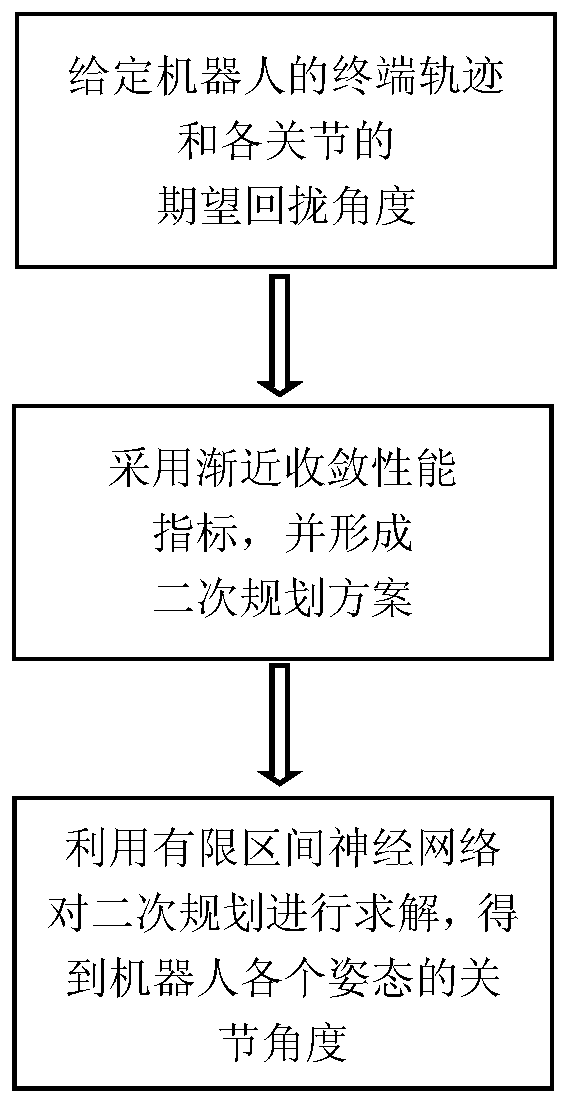
[0091] refer to Figure 1 to Figure 9 , a repetitive motion planning method for redundant robots based on finite interval neural networks, figure 1 The flow chart of the repetitive motion planning scheme for redundant robots consists of the following three steps: 1. Determine the expected trajectory of the redundant robot end effector and the expected angles of each joint; 2. Adopt the asymptotic convergence performance index and form redundant The quadratic planning scheme for the repetitive motion of the robot; 3. Solve the quadratic programming problem with a finite interval neural network to obtain the trajectory of each joint angle, as follows:
[0092] 1) Determine the desired trajectory
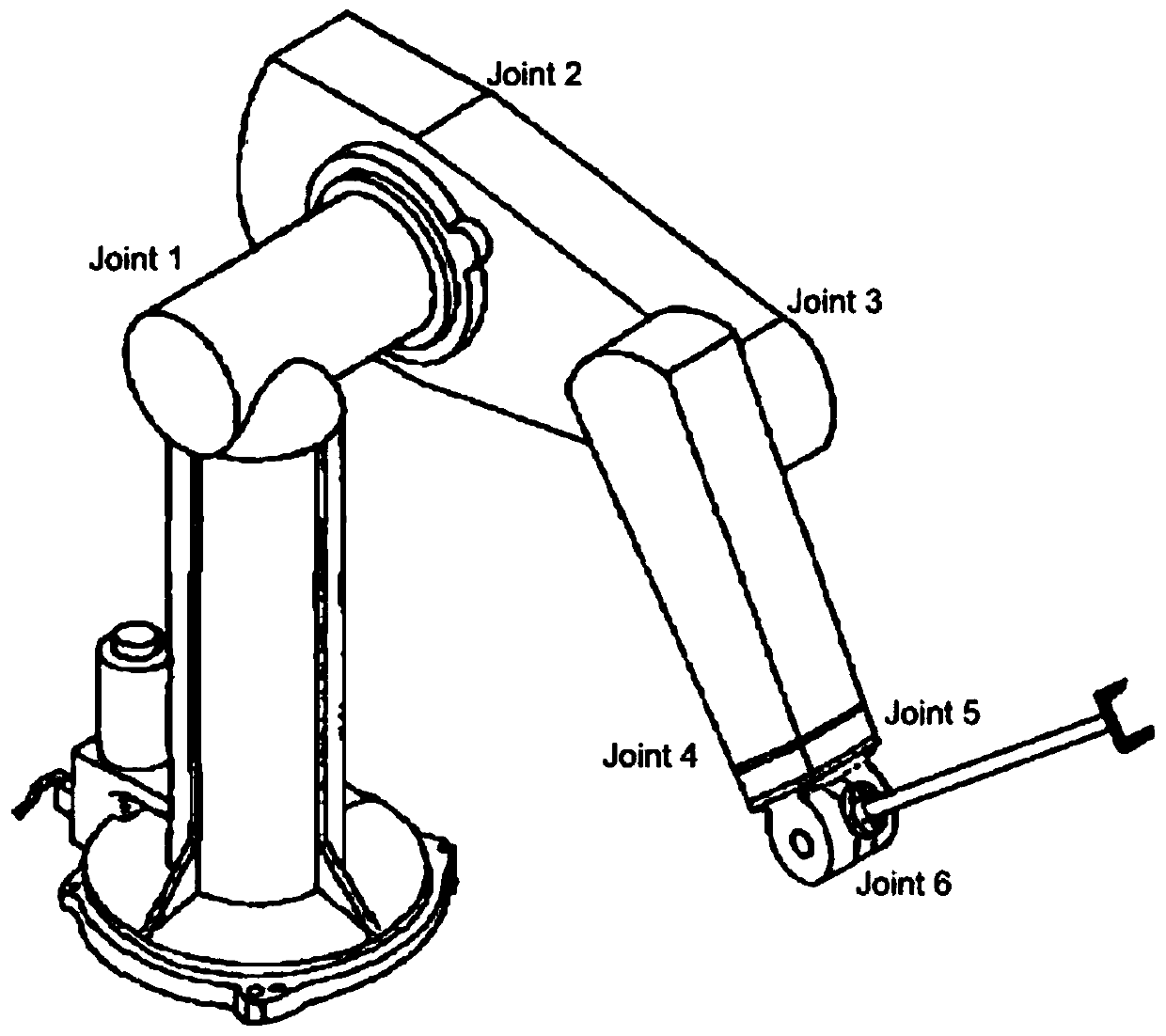
[0093] Setting expectations for redundant robots PUMA560 for reunion
[0094] Determine the coordinates of the center of the circle trajectory
[0095] (x=0.2m, y=0, z=0)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com