A Method for Repeated Motion Planning of Redundant Robots Using Fast Double Power Final State Neural Networks
A neural network and repetitive motion technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to converge within a limited time and low calculation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0103]The present invention will be further described below in conjunction with the drawings.
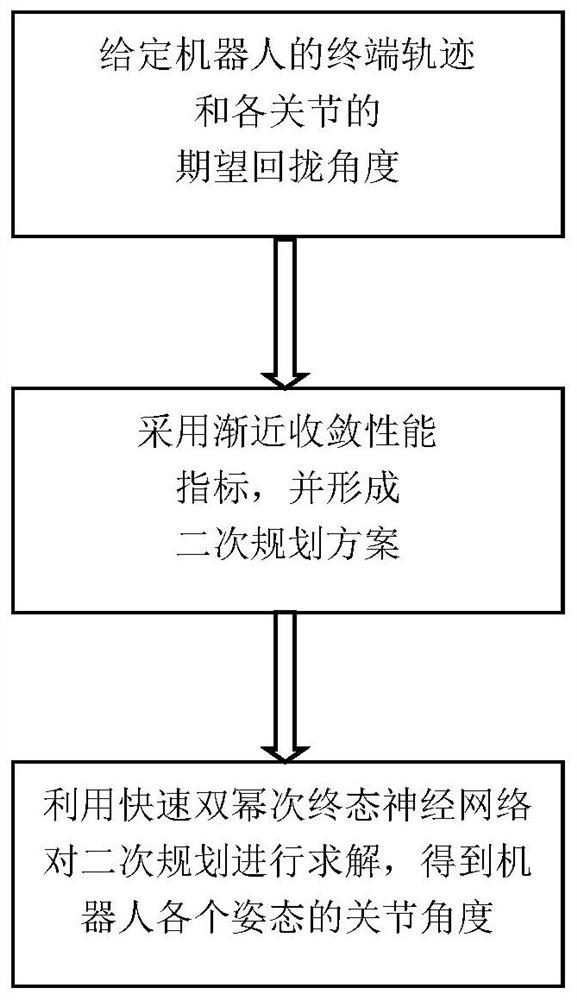
[0104]ReferenceFigure 1~Figure 9, A redundant robot repetitive motion planning method using fast dual-power final state neural network,figure 1 The flow chart of the redundant robot's repetitive motion planning scheme consists of the following three steps: 1. Determine the expected trajectory of the redundant robot end effector and the desired angle of each joint; 2. Use the asymptotic convergence performance index and form a redundant Repetitive motion of the remaining robot's secondary planning scheme; 3. Solving the secondary planning problem with a fast dual-power final state neural network to obtain the trajectory of each joint angle, including the following steps:
[0105]1) Determine the desired trajectory
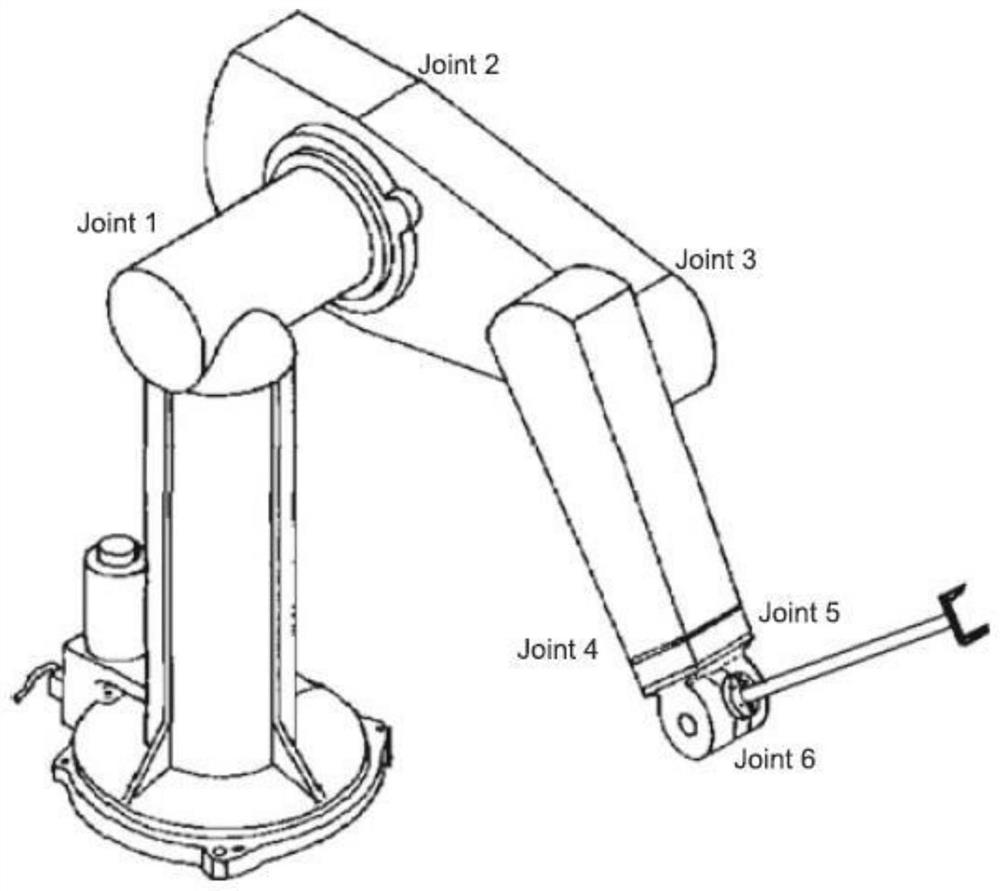
[0106]Set the expectations of the redundant robot PUMA560rad, determine the center coordinates of the circle track (x=0.2m, y=0, z=0), set the radius of the circle to 0.2m, and the angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com