Design method for optimal controller of linear discrete time system with control time delay
A linear discrete time system technology, applied in design optimization/simulation, instrumentation, calculation, etc., can solve problems such as the unresolved exponential stability of linear discrete time systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
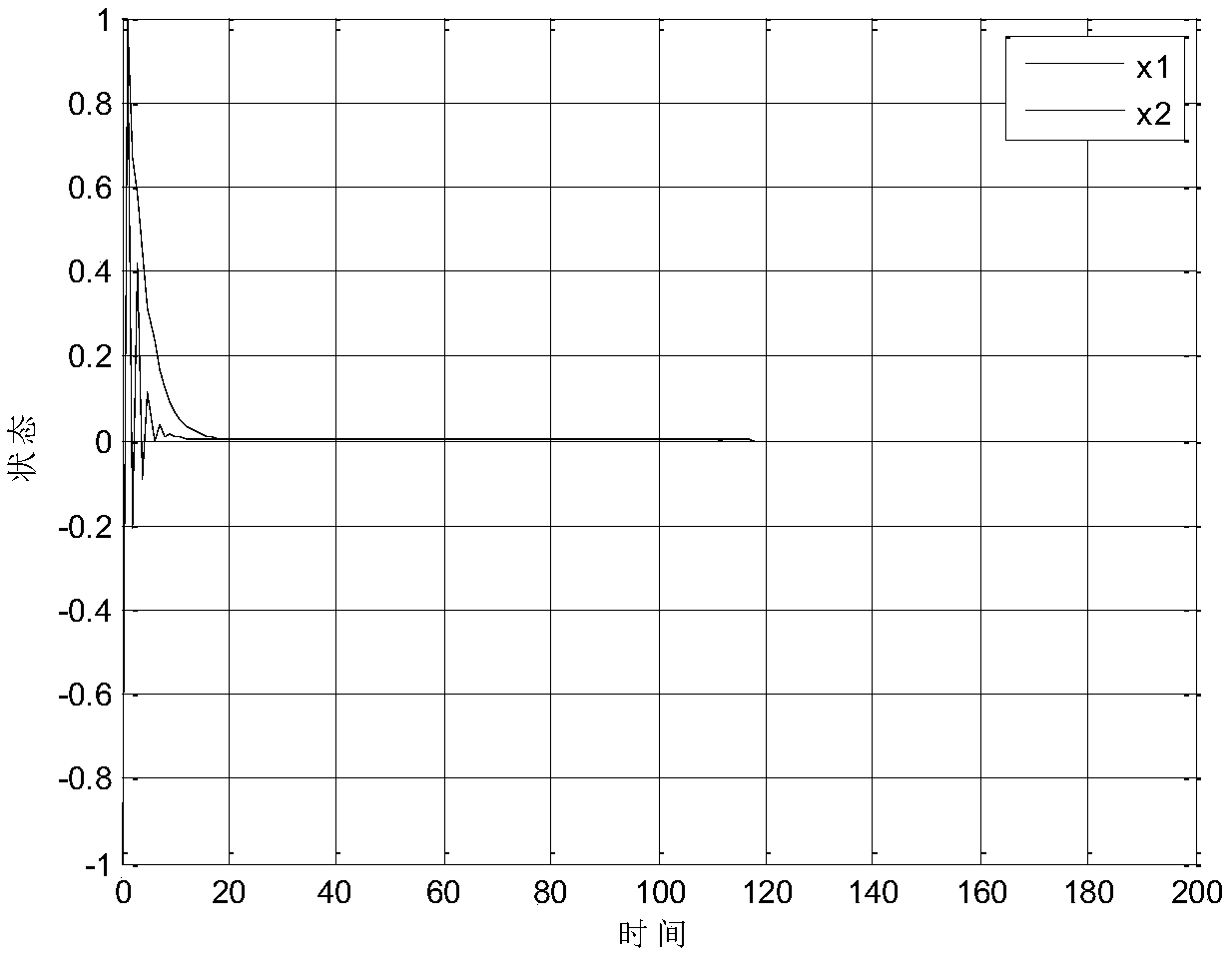
[0123] The linear discrete time system with control delay is as follows,
[0124] x k+1 =Ax k +Bu k +B 1 u k-3
[0125] among them
[0126]
[0127] The parameters selected in the simulation are as follows:
[0128] F=diag(1,1), Q=diag(0.01,0.01),
[0129] R=1, N=200
[0130] For the finite time optimal control of the system, calculate P in equation (4) k The value of is not very convenient, P k Calculation method and literature (HLLiu, QXZhu, New Forms of Riccati equations and the further results of the optimal control for linear discrete-time systems. International Journalof Control, Automation and Systems. 2014, 12(6): 1160-1164. The calculation method in) is the same. When P N ,P N-1 ,LP 2 ,P 1 When the value of is known, the finite time optimal controller of the system can be calculated. When the initial value of the system is x 0 =[1-1] T When the state of the closed-loop system responds as figure 1 Shown. From figure 1 It can be seen that the closed-loop system with a finite...
Embodiment 2
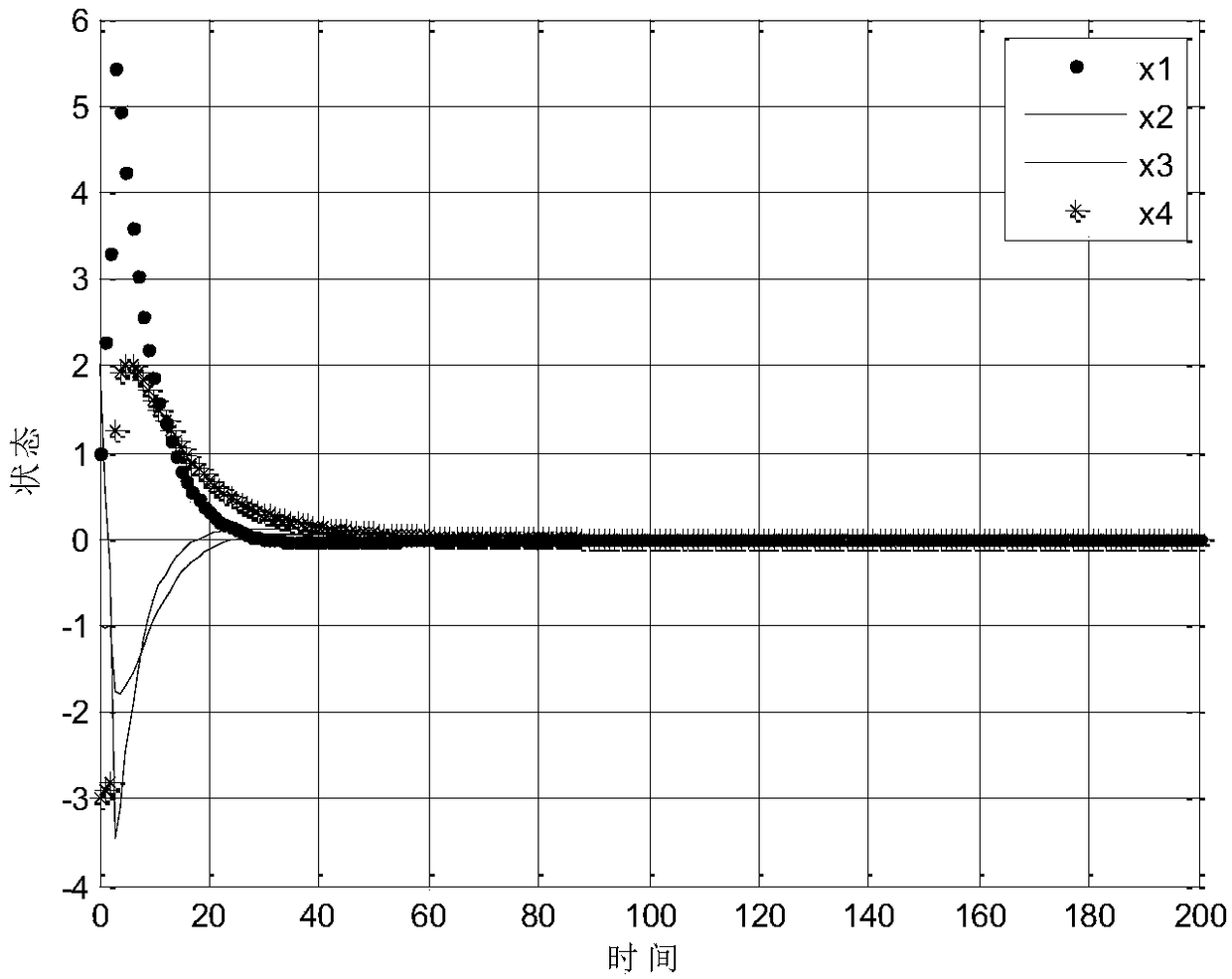
[0134] The linear discrete time system with control delay is as follows,
[0135] x k+1 =Ax k +Bu k +B 1 u k-2
[0136] among them
[0137]
[0138]
[0139] The parameters selected in the simulation are as follows:
[0140] F=diag(1,1,1,1), Q=diag(0.1,0.1,0.1,0.1),
[0141] R=diag(1,1), N=200
[0142] For the finite time optimal control of the system, P k The calculation method of is the same as in the first embodiment. The initial value in the system is x 0 =[1 1 -2 -3] T When the state of the closed-loop system responds as image 3 Shown. From image 3 It can be seen that the closed-loop system with a finite-time optimal conversion controller is exponentially stable. For the infinite time optimal control of the system, it is easy to know that the system is controllable. Use Matlab function DARE to get the value of P as follows.
[0143]
[0144] The initial value in the system is x 0 =[1 -1 2 -3] T When, the state response of the closed-loop system with the infinite time optimal co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com