


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Pose detection system for sea wave active compensation system
An active compensation and detection system technology, which is applied in directions such as navigation through speed/acceleration measurement, can solve problems such as danger, and achieve the effects of ensuring accuracy, real-time performance, and ease of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
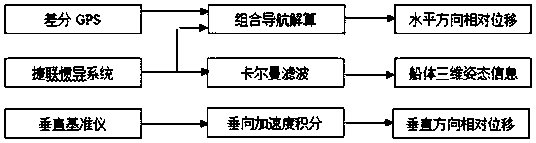
[0021] Implementation 1: If figure 1 As shown, the pose detection system of the wave active compensation system is mainly composed of vertical datum, differential GPS, strapdown inertial navigation system and pose comprehensive calculation system. The vertical datum is used to detect the relative position of the heave direction of the operation and maintenance ship. The vertical datum contains an IMU inertial measurement unit that can measure acceleration. The inertial measurement unit is fixed on the heave of the pose detection system of the active wave compensation system. direction, when there is an acceleration a opposite to the direction of gravity in the heave direction, the current velocity vt can be obtained by integrating the acceleration:
[0022] v t =∫(a-g)dt (1)
[0023] The position change in the heave direction can be obtained by integrating the existing velocity:
[0024] x t =∫v t dt (2)
[0025] The strapdown inertial navigation system is used to detect...
Embodiment 2
[0050] Implementation 2: If figure 2 As shown, the strapdown inertial navigation system is placed at the center of the operation and maintenance ship, as shown at point C in the figure, and the vertical datum is placed at the center of the six-degree-of-freedom platform base of the active wave compensation system, as shown at point B , the differential GPS is placed on the top of the cab of the operation and maintenance ship, as shown at point A in the figure.
[0051] Let the pose matrix of point C be:
[0052]
[0053] Change the matrix to the following form:
[0054]
[0055] In the formula, R is the attitude matrix, and the unknown quantities contained in the matrix are given by the strapdown inertial navigation system after measurement and solution. The px and py in the formula are the horizontal relative position of point C, which is the automatic compensation time of the relative sea wave active compensation system The position value of is obtained by combining...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com