Pedestrian detection algorithm of fusing color image edges and HOD (Histogram of Oriented Depths)
A technology of color image and depth direction, which is applied in computing, computer components, character and pattern recognition, etc., and can solve the problem of local characteristic illumination not being robust
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the objects, features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings.
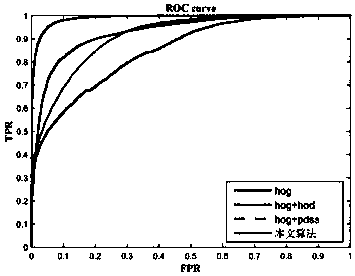
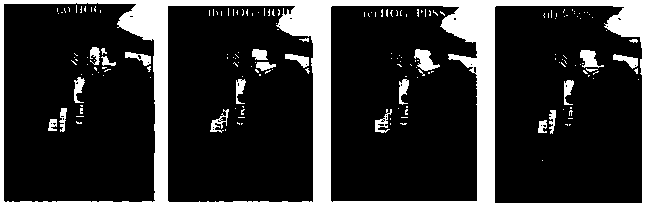
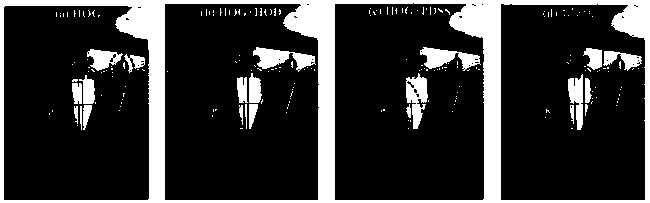
[0051] Such as Figure 1-Figure 3 As shown in , the pedestrian detection algorithm that fuses the edge of the color image and the depth direction histogram, the specific steps are as follows:
[0052] Step 1) input the picture pair to be tested, the picture pair includes an RGB image and a depth image;
[0053] Step 2) scaling the test image until the image size is smaller than the fixed window size;
[0054] Step 3) traversing all images under each scale with a fixed-size window, then extracting edge features from RGB images through shear waves, and extracting HOD features from depth images;
[0055] Step 4) concatenate the features of each pair of image pairs with a fixed window size to obtain fusion features;
[0056] Step 5) Input the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com