Underwater control system
A control system and controller technology, applied in control/adjustment system, transmission system, radio transmission system, etc., can solve the problems of limited cable length, waste of manpower and material resources, and high cost of going to sea, so as to save manpower and material resources and expand the control range , The effect of reducing the cost of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
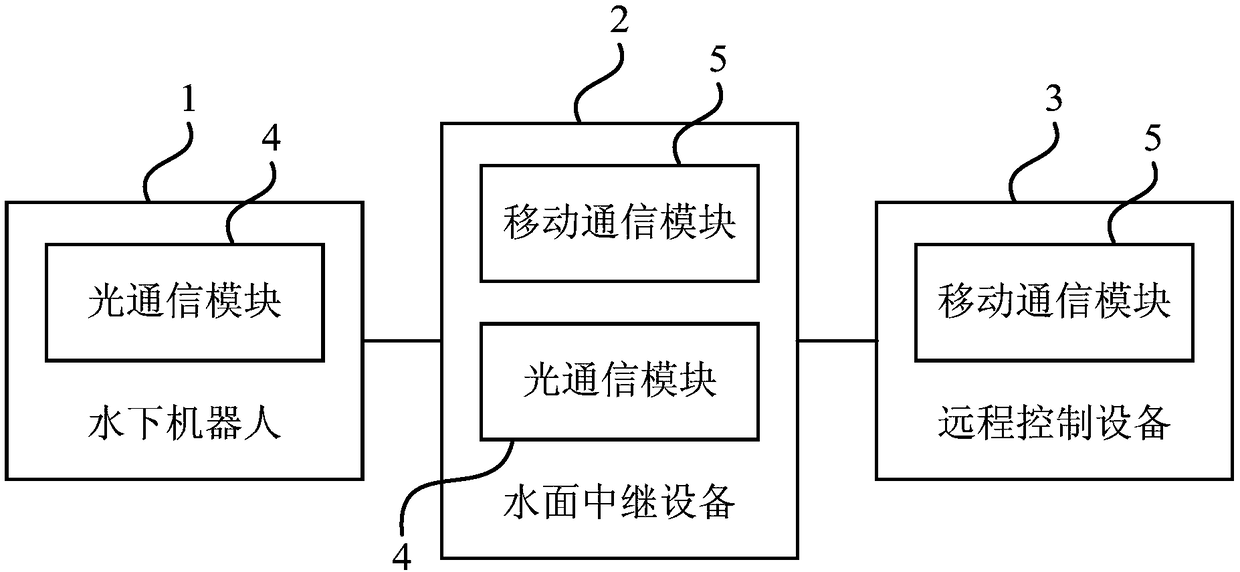
[0034] Figure 1a It is a schematic structural diagram of an underwater control system provided by Embodiment 1 of the present invention. This embodiment is applicable to remote control of an underwater robot. The underwater control system provided by this embodiment includes: an underwater robot 1 , a surface relay device 2 and a remote control device 3 .
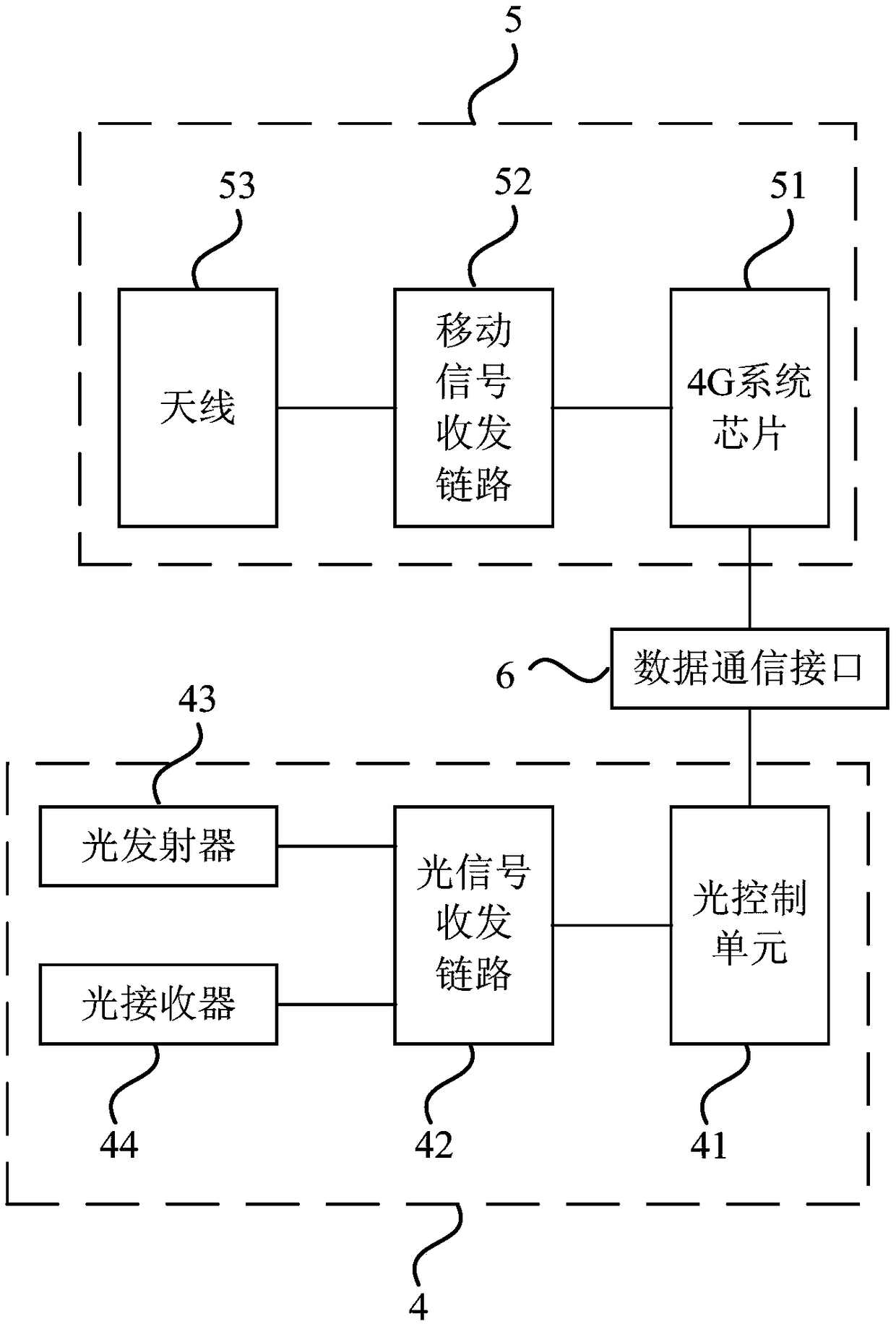
[0035] Among them, the underwater robot 1 and the surface relay device 2 are respectively provided with an optical communication module 4 for optical communication, and the water surface relay device 2 and the remote control device 3 are respectively provided with a mobile communication module for mobile communication. 5. The surface relay device 2 establishes a communication connection between the underwater robot 1 and the remote control device 3 through the optical communication module 4 and the mobile communication module 5 .
[0036] Exemplarily, the underwater robot 1 can be a device with a diving function such as an...
Embodiment 2
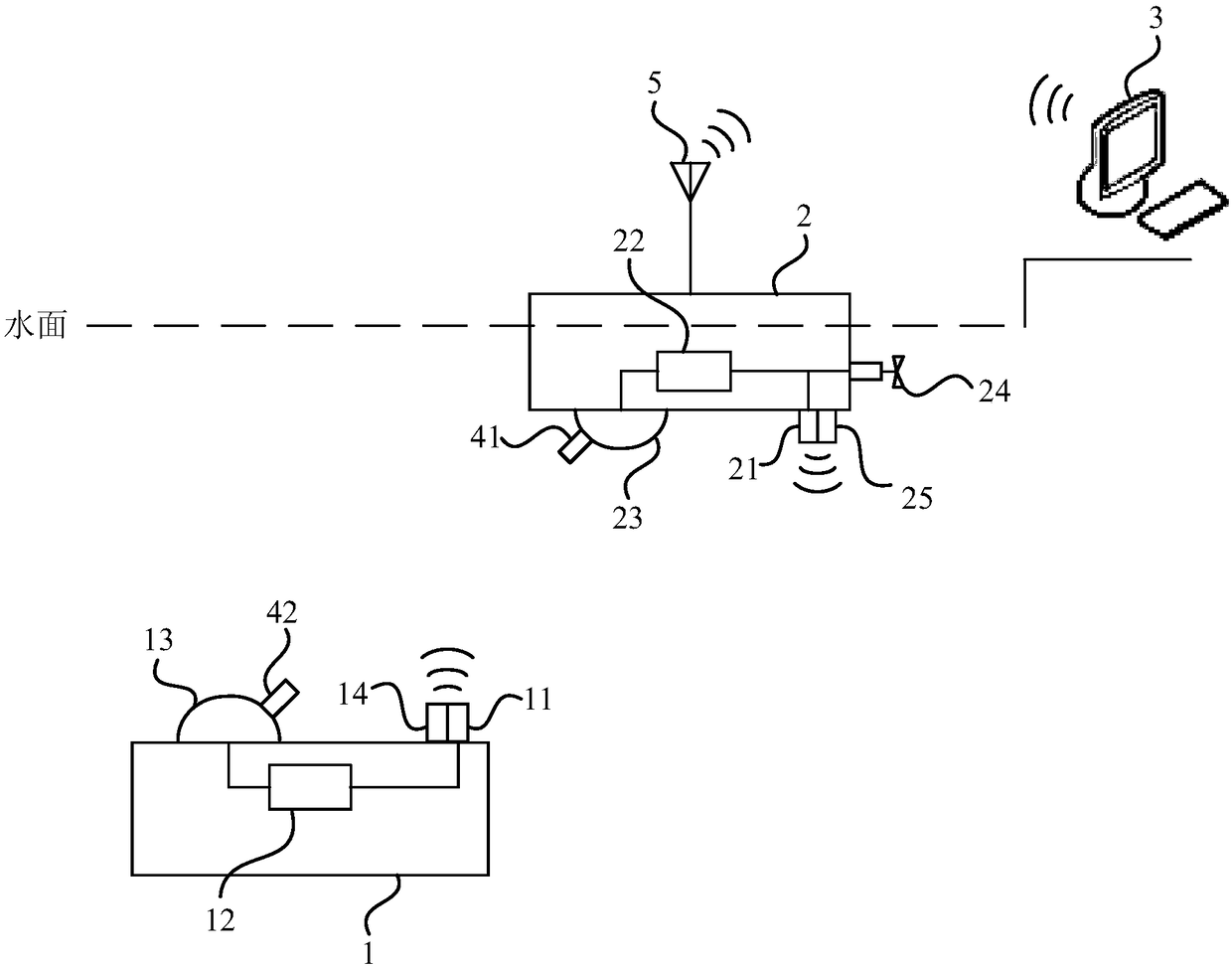
[0047] Figure 2a It is a schematic structural diagram of an underwater control system provided by Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above embodiments to provide an optimal underwater control system, in particular, the surface relay equipment is further optimized. Specifically include the following:
[0048] In the water surface relay device 2, a first positioning and transmitting module 21, a first controller 22, and a first rotating platform 23 for carrying an optical communication module 41 are also arranged, and in the underwater robot 1, a first The first positioning response module 14 matched by the positioning transmitting module 21; the first controller 22 is connected to the first positioning transmitting module 21 and the first rotating platform 23 respectively; the first positioning transmitting module 21 is used to send acoustic signals to the surrounding environment. signal, and according to the response sign...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com